Scurtă introducere în teoria și tipurile de drivere, sfaturi privind selectarea driverului optim pentru un motor pas cu pas.
Dacă doreșticumpărați un driver de motor pas , faceți clic pe Inforermer din dreapta
Unele informații care vă pot ajuta selectați un driver motor pas.
Motorul cu motor pas cu pas cu o schemă complexă de control care necesită specială dispozitiv electronic - Driver Drive Stepper. Driverul motorului de pasare primește semnale logice de pas / dir, care, de regulă, sunt reprezentate de un nivel ridicat și scăzut de tensiune de susținere 5 V, iar în conformitate cu semnalele rezultate modifică curentul în înfășurările motorului, forțând arborele la Rotiți în direcția corespunzătoare la unghiul specificat. \u003e Semnalele pas / dir sunt generate de un controler CNC sau de un computer personal care rulează programul de control Mach3 sau LinuxCNC.
Sarcina driverului este de a schimba curentul în înfășurări cât mai eficient posibil și, deoarece inductanța înfășurărilor și a rotorului motorului de stepper hibrid interferează în mod constant în acest proces, șoferii sunt foarte diferiți unul de celălalt cu caracteristicile lor și calitatea mișcării rezultate. Curentul care curge în înfășurări determină mișcarea rotorului: valoarea curentă stabilește cuplul, dinamica acestuia afectează uniformitatea etc.
Tipuri (tipuri) Drivere SD
Driverele sunt împărțite la metoda de descărcare a curentului în lichidare în mai multe tipuri:
1) Drivere de tensiune uscată
Aceste drivere alimentează nivelul de tensiune constant alternativ pe înfășurare, curentul rezultat depinde de rezistența înfășurării și la viteze mari - și de la inductanță. Aceste șoferi sunt extrem de ineficiente și pot fi utilizate numai la viteze foarte mici.
2) Drivere duplex
În șoferii de acest tip, curentul din înfășurare este la început crește la nivelul dorit folosind o tensiune ridicată, atunci sursa de înaltă tensiune este oprită și curentul dorit este menținut de o sursă de joasă tensiune. Astfel de șoferi sunt destul de eficiente, printre altele, reduc încălzirea motoarelor și se pot întâlni uneori în echipamente de înaltă clasă. Cu toate acestea, astfel de drivere sunt acceptate numai prin modul pas și semi-pas.
3) Drivere de grâu.
În prezent, șoferii PWM de motoare Stepper sunt cele mai populare, aproape toți șoferii de pe piață - acest tip. Aceste drivere sunt supuse în lichidarea unui semnal PWM cu motor pas cu pas cu o tensiune foarte mare, care este tăiată pentru a atinge nivelul curent. Valoarea curentului pentru care este setul de întrerupere este setat fie printr-un potențiometru, fie printr-un comutator DIP, uneori această valoare este programată utilizând un software special. Aceste drivere sunt destul de intelectuale și sunt echipate cu o varietate de funcții suplimentare, susțin diferite diviziuni de pitch, ceea ce face posibilă creșterea discredității poziționării și netezitei. Cu toate acestea, șoferii PWM sunt, de asemenea, foarte diferiți unul de celălalt. În plus față de caracteristicile, cum ar fi tensiunea de alimentare și curentul maxim de înfășurare, ele diferă în frecvența PWM. Este mai bine dacă frecvența șoferului este mai mare de 20 kHz și, în general, decât este mai mult - cu atât mai bine. Frecvența sub 20 khz afectează caracteristicile de conducere ale motoarelor și se încadrează în gama sonoră, motoarele pas cu pas încep să facă un vârf neplăcut. Driverele motoarelor pas cu pas în urma motoarelor în sine sunt împărțite în unipolar și bipolar. Masini-unelte non-pornire Recomandă cu tărie să nu experimenteze cu unitățile, dar să aleagă pe care puteți obține cantitatea maximă de asistență tehnică, informații și pentru care produsele de pe piață sunt prezentate cel mai mult. Acestea sunt driverele motoarelor hibride hibride bipolare.
Cum de a alege un driver motor (SD)
Primul parametruCeea ce merită să acordați atenție atunci când vă decideți să alegeți un driver motor pasit - aceasta este puterea curentului pe care șoferul o poate furniza. De regulă, este reglabilă într-o gamă destul de largă, dar merită ca șoferul să aleagă astfel încât să poată produce curent egal cu faza curentă a motorului pasul selectat. Este de dorit, desigur, că șoferul maxim pentru șofer este încă 15-40% mai mult. Pe de o parte, va da un stoc în cazul în care doriți să obțineți un moment mai mare din motor, sau în viitor pune mai mult decât motor puternicPe de altă parte, nu va fi excesivă: producătorii uneori "personalizează" ratingurile componentelor radio-electronice la unul sau altul tip / dimensiune a motoarelor, șoferul prea puternic pentru 8 A, controlul motorului NEMA 17 (42 mm ), poate, de exemplu, să provoace vibrații inutile.
Al doilea moment - Aceasta este tensiunea de alimentare. Parametru foarte important și ambiguu. Influența sa este destul de multipătă - tensiunea de alimentare afectează dinamica (momentul revoluții mari), vibrații, încălzirea motorului și șoferii. De obicei, tensiunea maximă de alimentare este aproximativ egală cu curentul maxim pe care l-am înmulțit cu 8-10. Dacă tensiunea maximă de alimentare specificată a driverului este drastic diferită de aceste valori - este necesar să se întrebe în continuare care este motivul pentru o astfel de diferență. Cu cât este mai mare inductivitatea motorului - este necesară mai multă tensiune pentru șofer. Există o formulă empirică U \u003d 32 * sqrt (L), unde l este inductanța de înfășurare a motorului. Valoarea U, obținută în conformitate cu această formulă, este foarte aproximativă, dar vă permite să navigați atunci când este selectat driverul: U ar trebui să fie aproximativ egal cu valoarea maximă validă a driverului. Dacă ați primit u la 70, atunci șoferii EM706, AM882, YKC2608M-H trec pe acest criteriu.
A treia aspect - prezența intrărilor manifestate. În aproape toți șoferii și controlorii fabricați la fabrici, cu atât mai mult brand, este necesar Tuorie, deoarece șoferul este un dispozitiv electronic de putere, iar pauza cheie poate duce la un impuls puternic pe cabluri pentru care sunt hrănite semnalele de control și Burnout controler CNC scump. Cu toate acestea, dacă vă decideți să alegeți un driver de model SD stoervici, este necesar să întrebați în continuare prezența intrărilor și ieșirilor.
Al patrulea aspect - prezența mecanismelor de suprimare a rezonanței. Rezonanța motorului pas cu pas este fenomenul care se manifestă mereu, diferența este numai în frecvența rezonantă, care depinde în primul rând de momentul inerției încărcăturii, tensiunea de alimentare a șoferului și puterea de fază a motorului montat. Dacă apare rezonanța, motorul pas cu pas începe să vibreze și să-și piardă cuplul, până la oprirea completă a arborelui. Pentru suprimarea rezonanței, microbgii sunt utilizați și - algoritmi de compensare a rezonanței încorporate. Motorul de pasare al motorului pas cu pas generează microcolementul inducției EMF în înfășurări și prin caracterul și amplitudinea lor, șoferul determină dacă există o rezonanță și cât de puternică este. În funcție de datele primite, driverul alunecă un pas ușor motor în timp reciproc - o astfel de rezonanță a nivelului de inegalitate artificială. Mecanismul de suprimare a rezonanței este construit în toate\u003e șoferii de lider DM, AM și EM. Driverele cu suprimare a rezonanței sunt drivere de înaltă calitate, iar dacă bugetul vă permite să o luați mai bine. Cu toate acestea, fără acest mecanism, șoferul rămâne un dispozitiv de lucru destul de mare - cea mai mare parte a driverelor vândute - fără compensarea rezonanței și, totuși, zeci de mii de mașini lucrează fără probleme în întreaga lume și își îndeplinesc cu succes sarcinile.
Al cincilea aspect - Partea de protocol. Trebuie să vă asigurați că șoferul funcționează pe protocolul de care aveți nevoie, iar nivelurile semnalelor de intrare sunt compatibile cu nivelurile logice necesare. Acest check este al cincilea element, deoarece cu o excepție rară, numărul copleșitor de drivere funcționează prin etapa / dir / activare și este compatibil cu nivelul semnalului de 0..5 V, trebuie doar să vă asigurați.
A șasea aspect - prezența funcțiilor de protecție. Printre acestea, protecția împotriva excesului de tensiune de alimentare, curentul înfășurărilor (incl. De la scurtcircuit de înfășurări), de la inversarea tensiunii de alimentare, de la conexiunea greșită a fazelor motorului pas. Cu atât mai multe astfel de funcții - cu atât mai bine.
Al șaptelea aspect - prezența modurilor de micro-schimbătoare. Acum aproape în fiecare șofer există numeroase moduri de microcrust. Cu toate acestea, din fiecare regulă există excepții și în driverele Geckodrive doar un pas 1/10. Acest lucru este motivat de faptul că mai multă divizie nu aduce o precizie mai mare, ceea ce înseamnă că nu este nevoie. Cu toate acestea, practica arată că microsgge nu crește deloc discreditatea poziționării sau preciziei, ci de faptul că cu atât este mai mare diviziunea pasului, mișcarea netedă a arborelui motorului și mai puțină rezonanță. În consecință, toate celelalte lucruri fiind egale, merită să folosească diviziunea decât mai mult, cu atât mai bine. Diviziunea maximă admisă va fi determinată nu numai de tabelele lui Brady încorporate în șofer, dar și frecvența maximă a semnalelor de intrare - deci, pentru șofer cu o frecvență de intrare de 100 kHz, nu are sens să folosească diviziunea 1 / 256, deoarece viteza de rotație va fi limitată la 100.000 / (200 * 256) * 60 \u003d 117 rpm, care pentru un motor pas cu pas este foarte mic. În plus, computerul personal va fi, de asemenea, în măsură să genereze semnale cu o frecvență mai mare de 100 kHz. Dacă nu intenționați să utilizați un controler Hardware CNC, atunci 100 kHz cel mai probabil va fi tavanul dvs., care corespunde diviziunii 1/32.
A opta aspect - prezența funcțiilor suplimentare. Este posibil să existe o mulțime de ele, de exemplu, funcția de definiție a "defalcării" - o oprire bruscă a arborelui atunci când cuplul este blocat sau lipsit de un motor pas cu pas, ieșiri pentru indicarea erorilor externe etc. Toate acestea nu sunt necesare, dar pot ameliora foarte mult viața atunci când construiește o mașină.
Al nouălea și cel mai important aspect- Driver de calitate. Este practic asociată cu caracteristicile etc. Există numeroase propuneri de pe piață și, uneori, caracteristicile driverelor a doi producători coincid aproape la virgulă și le-au stabilit pe mașină, devine clar că unul dintre producători nu este în mod clar angajat în afacerea lor și În producția de fiare ieftine, el este mai norocos. Determinați nivelul șoferului în avans pentru un fel de date indirecte este destul de dificil pentru un nou venit. Puteți încerca să vă concentrați asupra numărului de funcții inteligente, cum ar fi "detectarea stall" sau suprimarea rezonanței, precum și utilizarea metodei dovedite - pentru a naviga pe branduri.
Articolul prezintă schemele fundamentale ale opțiunilor pentru un controler și rezident al motorului pasiv și ieftin software. (firmware) pentru el.
Descriere generala.
Controlerul motorului de pasare este proiectat pe controlerul PIC PIC12F629. Acesta este 8 microcontroler de ieșire în valoare totală de 0,5 USD. În ciuda schemei simple și a costului scăzut al componentelor, controlerul oferă caracteristici destul de ridicate și o funcționalitate largă.
- Controlerul are opțiuni pentru controlul atât unipolar, cât și bipolar motor de mers pe jos..
- Oferă ajustarea vitezei motorului pe o gamă largă.
- Are două moduri de control:
- cu pas;
- hemisfan.
- Oferă rotație în direcții directe și inverse.
- Setarea modurilor, parametrii, controlul controlerului se efectuează prin două butoane și semnal (incluziune).
- Când alimentarea este oprită, toate modurile și parametrii sunt salvați în memoria non-volatilă a controlerului și nu necesită reinstalare atunci când sunt pornite.
Controlerul nu are protecție împotriva scurtcircuitului înfășurărilor motorului. Dar implementarea acestei funcții complică semnificativ complicează schema, iar închiderea înfășurărilor este cazul este extrem de rar. Nu am întâlnit astfel. În plus, oprirea mecanică a arborelui motorului de pasare în timpul rotației nu provoacă curenți periculoși, iar protecția șoferului nu necesită.
Despre moduri și metode pentru gestionarea unui motor pas cu pas pot fi citite despre scafandri.
Diagrama controlerului motorului unipolar cu șoferul pe tranzistoare bipolare.

Explicați în schemă mai ales nimic. La controlerul PIC conectat:
- butoanele "+" și "-" (prin intrarea analogică a comparatorului);
- pe semnal (pornirea motorului);
- driver (tranzistoare VT1-VT4, diode de protecție VD2-VD9).
PIC utilizează un generator Tact intern. Modurile și parametrii sunt stocați în EEPROM-ul intern.
Diagrama șoferului pe tranzistoarele bipolare KT972 oferă un curent de comutare până la 2a, tensiunea înfășurărilor până la 24 V.
Am salvat controlerul pe dimensiuni cu dimensiuni de 45 x 20 mm.

Dacă curentul de comutare nu depășește 0,5 A, tranzistoarele seriei BC817 pot fi utilizate în incinte SOT-23. Dispozitivul se va dovedi destul de miniatură.
Controlul software-ului și controlerului.
Software-ul rezident este scris pe un asamblator cu o reinstalare ciclică a tuturor registrelor. Programul nu va depinde în principiu. Descărcați software-ul (firmware) pentru PIC12F629.
Controlul controlerului este suficient.
- Cu semnalul activ "On" (închis pe pământ) motorul se rotește, cu inactiv (tăiat de pe pământ) - oprit.
- Când motorul funcționează (semnalul ON activ), butonul "+" și "-" modifică viteza de rotație.
- Fiecare apăsare pe butonul "+" mărește viteza la discretăți minime.
- Apăsând butonul "-" - reduce viteza.
- Când țineți butoanele "+" sau "-", viteza de rotație crește fără probleme sau scade, cu 15 valori discrete în sec.
- Când motorul este oprit (semnalul ON nu este activ).
- Apăsând butonul "+" stabilește modul de rotație în direcția înainte.
- Apăsând butonul "-", traduce controlerul în modul de rotație reversibilă.
- Pentru a selecta modul, o etapă completă sau semi-pas necesară când se aplică pornirea controlerului, țineți apăsat butonul "-". Modul de control al motorului va fi modificat la altul (inversat). Este suficient să rezistă la butonul - apăsat timp de 0,5 secunde.
O diagramă a controlerului motor unipolar cu un șofer pe tranzistoarele MOSFET.

Tranzistorii MOSFET de prag scăzut vă permit să creați un driver cu parametri mai mari. Aplicarea în driverul tranzistorilor MOSFET, de exemplu, IRF7341 oferă următoarele avantaje.
- Rezistența la tranzistori în stare deschisă nu mai mult de 0,05 ohmi. Aceasta înseamnă o scădere de tensiune mică (0,1 V la un curent 2 a), tranzistoarele nu se încălzesc, nu necesită radiatoare de răcire.
- Transistor curentul până la 4 A.
- Tensiune de până la 55 V.
- Într-unu 8, cazul de ieșire SOIC-8 a plasat 2 tranzistori. Acestea. Execuția șoferului va necesita 2 clădiri miniaturale.
Astfel de parametri nu pot fi realizați pe tranzistoare bipolare. Cu curentul de comutare, peste 1, recomand foarte mult versiunile tranzistorilor MOSFET.
Conectarea la controlerul motoarelor unipolar stepper.
În modul unipolar, motoarele cu configurații de înfășurare 5, 6 și 8 fire pot funcționa.
Diagrama conexiunii unui motor unipolar pas cu pas cu 5 și 6 fire (ieșiri).

Pentru FL20, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH, FL57STH cu configurația de înfășurări 6 fire, concluziile sunt marcate cu următoarele culori.

Configurația cu 5 fire este o opțiune în care firele de înfășurare partajate sunt conectate în interiorul motorului. Astfel de motoare sunt. De exemplu, PM35S-048.

Documentația privind motorul de pasare PM35S-048 în format PDF poate fi descărcat.
Diagrama conexiunii motorului unipolar pas cu pas cu 8 fire (ieșiri).

La fel ca și pentru versiunea anterioară, numai toate conexiunile înfășurărilor apar în afara motorului.
Cum de a alege o tensiune pentru un motor pas cu pas.
Conform legii Ohm prin rezistența înfășurării și curentul de fază admisibil.
U \u003d iPhazy * robs
Rezistența la lichidarea DC poate fi măsurată, iar curentul trebuie semnat în datele de referință.
Subliniem că vorbim despre șoferii simpli care nu oferă o formă complexă de curent și de tensiune. Astfel de moduri sunt utilizate la viteze mari de rotație.
Cum să determinați înfășurările motoarelor pas cu pas dacă nu există date de referință.
În motoarele unipolare cu 5 și 6 concluzii, producția medie poate fi determinată, măsurarea, rezistența la înfășurări. Între faze, rezistența va fi de două ori mai mare decât între concluzia și faza mijlocie. Concluziile medii sunt conectate la sursa de alimentare Plus.
În plus, oricare dintre concluziile de fază poate fi atribuită fazei A. 8 Vor fi 8 opțiuni pentru complotare. Puteți să le treceți prin ele. Dacă considerăm că înfășurarea fazei B are un fir mediu diferit, atunci opțiunile devin și mai puțin. Fruntea înfășurărilor fazei nu duce la eșecul șoferului sau al motorului. Motorul de zgomot și nu se rotește.
Este necesar să ne amintim că viteza de rotație este prea mare la același efect (ieșirea din sincronizare). Acestea. Este necesar să se instaleze viteza de rotație.
Circuitul controlerului motorului bipolar cu șofer integrat L298N.
Regimul bipolar oferă două avantaje:
- un motor poate fi utilizat cu aproape orice configurație a înfășurărilor;
- aproximativ 40% crește cuplul.
Creați o schemă de driver bipolar pe elemente discrete - Cauză neregulată. Este mai ușor să utilizați driverul integral L298N. Descrierea în limba rusă este.
Circuitul controlerului cu șoferul bipolar L298N arată așa.

Driverul L298N este inclus în diagrama standard. O astfel de opțiune a controlerului oferă curenți de fază până la 2a, tensiunea de până la 30 V.
Conectarea la controlerul motoarelor de pasare bipolară.
În acest mod, un motor poate fi conectat cu orice configurație a înfășurărilor 4, 6, 8 fire.
Diagrama conexiunii motorului de pasare bipolară cu 4 fire (ieșiri).

Pentru motoarele FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH Cu configurația înfășurărilor 4 fire, concluziile sunt marcate cu următoarele culori.
Diagrama conexiunii unui motor de pasare bipolară cu 6 fire (ieșiri).

Pentru motoarele FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH cu o astfel de configurație de înfășurări, concluziile sunt marcate cu următoarele culori.
O astfel de schemă necesită tensiunea de alimentare de două ori mai mare decât includerea unipolară, deoarece Rezistența înfășurărilor este de două ori mai mult. Cel mai probabil, controlerul trebuie conectat la 24 V.
Diagrama conexiunii unui motor de pasare bipolară cu 8 fire (ieșiri).
Pot exista două opțiuni:
- cu incluziune succesivă
- cu incluziune paralelă.
Schema de incluziune serială a înfășurărilor.

Schema cu transformarea secvențială a înfășurărilor necesită de două ori mai multă tensiune a înfășurărilor. Dar curentul de fază nu crește.
Diagrama incluziunii paralele a înfășurărilor.

Schema cu pornirea paralelă a înfășurărilor crește curenți de fază de 2 ori. Avantajele acestei scheme pot fi atribuite, inductanța scăzută a înfășurărilor în fază. Acest lucru este important la rate de mare viteză.
Acestea. Alegerea dintre includerea secvențială și paralelă a unui motor cu pas bipolar cu 8 conduceri este determinată de criteriile:
- curent maxim de acționare;
- tensiunea maximă a driverului;
- viteza de rotație a motorului.
Software-ul (firmware) pentru PIC12F629 poate fi descărcat.
Deci, gândirea de către șoferul de pe lemn de bipolarnikiști, nu am crezut că subiectul ar provoca un astfel de interes și va trebui să scrieți un articol mic despre adunare și configurație. Aici va fi considerat un șofer ca un bloc separat. pentru că Eu folosesc designul blocului. Acestea. Trei drivere, bord de interfață, sursă de alimentare. În primul rând, când nu reușiți un driver, șoferul se schimbă pur și simplu la rezervă, iar în al doilea (și cel mai important) este planificat să fie actualizat, este mai ușor să eliminăm un driver și să punem versiunea modernizată pentru funcționare. "Pachetul unic" este deja dezvoltarea subiectului și cred că voi răspunde la întrebări despre configurația UPSDJ _ SMART. Și, de asemenea, completați și corectați munca mea. Și acum la caz ...
Primul articol (nu puteți citi taxaJ. ). După gravare, mezzani și exerciții, inspectați cu atenție întreaga placă pentru JAMA. Snot, căi gravate etc. Poate rupe serios întregul buzz. Apoi, alimentați taxa, mai întâi toate jumperii, apoi rezistența, diodele, panourile, containerele și tranzistoarele bipolare. Vreau să desenez atentie speciala În atenția ta, îmi pare rău pentru ... Nu fi leneș înainte ca Pripa să verifice articolul pentru bunătate. Transvelca salvează uneori de la fum ... Știu că codificarea culorii rezistoarelor cu un bang, a râs de mai multe ori și cu specialități. Efecte. Când utilizați rezistențe din fagure, anii au scăzut din tot ceea ce va cădea sub braț, uitați că atunci când încălzirea roșie poate deveni portocalie și portocalie - galben ... Deprimăm sursa de alimentare + 5V, pas,GND. , și fire de controlVREF. . Despre acest fel se pare:

Punctul al doilea (Configurați modurile de funcționare și așteptare). 555 Eu personal merg la taxa care a pus panoul, ceea ce înseamnă că unitatea de afișare trebuie deconectată. Strippers pentru mijloc. Furnizarea pasului prin închidere pe un mod comun (modul slave). Nick Lanțul + 5V și dacă nu scurt, pornește puterea. Tester conectat la punctele de controlVREF (bine făcut DJ _ SMART , furnizate pe tablă), dacă ratele de accidente vasculare cerebrale și rezistența dintre ele corespund schemei, atunci sclavul este un accident vascular cerebral. Modurile pot ajusta tensiunea de aproximativ 0 - 1V adică. Curent 0 - 5A. Știți pe 1a. Totul este simplu aici.R. schimbare Avem 0,2 ohmi. Avem nevoie de 1A. 0,2х1 \u003d 0.2V. Acestea. Dacă instalămVREF. - 0.2V, curentul în lichidare va fi 1a. Dacă avem nevoie de un curent în înfășurare, spunem 2,5a, atunciVref \u003d 0,2x2.5 \u003d 0.5V.
Pe scurt, am stabilit 0.2V.

Acum mirosea pasul și societatea. Dacă toate elementele sunt normale și în conformitate cu schema, după deschiderea de aproximativ o jumătate de secundăVREF. scade de două ori (în cazul în care cel de-al doilea trimmer din mijloc) este configuratVREF. HOLD. Am 50%. De la lucrător:

Principalul lucru este să acordați atenție întârzierii obligatorii la comutare. Când pasul este închis general, modul de funcționare trebuie să fie pornit instantaneu și când este de deschidere, este de a păstra cu o întârziere de 0,5c. Dacă nu există întârzieri, căutați probleme, altfel nu vor exista glituri gravi atunci când lucrați. Dacă nu începeți, mergeți la subiectul forumului, nu aranjați incendiiJ.
Punctul trei (personalizați unitatea de indicare). Sigiliul este divorțat sub 315-361, precum șiDJ _ Smarta. De asemenea, o pungă, aveți nevoie pentru a lipi undeva ... dar, în principiu, puteți să lipiți orice pereche, de la a noastră am experimentat 502 - 503, 3102 - 3107, totul pluguri, doar să fiți atenți cu codul! Dacă totul este lipit și funcționează corect, funcționează fără probleme. Indicarea face o mică ajustare înVREF. Deci, după conectarea indicației, reglați în cele din urmă curentul sub SHD (mai bine pentru începerea a 70% din nominal). Fotografiile ca LED-urile nu arde nu au făcut-oJ.
Clauza patra, importantă (297) Opriți-o de la putere la 327 în locul dvs. Încă o dată, verificăm instalarea și elementele de legare, dacă totul este OK (cu orice îndoială, verificăm de două ori), dăm mese. Verificarea osciloscopului Semnalul de pe primul picior, este:

Fie pe 16 picioare, este:

Acest lucru înseamnă că PIEM a început, lucrul cu contorul de frecvență poate măsura frecvența, ar trebui să corespundă foarte mult la 20 kHz.
ATENŢIE!!! Este important!!!Chiar dacă PWM nu pornește, partea logică 297 va funcționa, adică Când sarcina este conectată, toate semnalele vor merge ... dar numără 24V fără shim 2. Deci, este important să vă asigurați că generatorul microcircuitului începe.
Punctul al cincilea. Am oprit din nou alimentarea și inserațiIr. , Am lovit lemnul. Atunci când utilizați un SHD cu un curent de înfășurare peste 2,5a, este necesar să suportați tembele la radiator. Vă rugăm să rețineți când diodele sunt stropite, acestea pot varia. Chiar nu am întâlnit (am inserat 522 și 1N. 4148 (analog) au coolevka coincide), dar având în vedere oameniiIr.
Luați în considerare driverul motorului electric pe tranzistori și microcircuitul L298, vom face față principiului muncii H-podului. Învățăm caracteristicile de conectare a driverelor pe L298 la diferite motoare Și sursele de alimentare, vom efectua experimente simple cu motoare pas cu pas și motoare de tensiune constantă. Conectarea la Raspberry Pi și cele mai simple programe pentru testul de control al driverului.
Ce este un pod H
La proiectarea mașinilor, roboților și a altor dispozitive automate, este necesar să se controleze motorul electric curent continuu sau bobinele motorului pas cu pas. Pentru a putea controla lichidarea motorului și a face ca arborele să se rotească în direcții diferite, este necesar să se efectueze comutarea cu răscumpărarea. În scopuri similare, se folosește așa-numitul "pod h".
De ce este un nume așa? - Deoarece comutarea motorului și comutatoarele de comutare pentru comutare se reamintește de litera latină H. Principiile operațiunii H-Bridge este prezentată NaRnk de mai jos.
Smochin. 1. Cum funcționează H-Bridge, principiul comutatorului motorului pentru rotație în diferite direcții.
După cum putem vedea, cu ajutorul a 4 întrerupătoare, putem conecta motorul la o sursă de alimentare în diferite polarități, care la rândul său va determina rotirea arborelui său în direcții diferite. Întrerupătoarele pot fi înlocuite cu releu sau pe taste electronice puternice pe tranzistori.
Este important să rețineți că este imposibil să se utilizeze două taste pe o parte a podului H, deoarece se oprește un scurtcircuit, la proiectarea unui circuit de pod, este necesar să se stabilească această regulă în logică și astfel să implementeze protecția.
Schema unui simplu H-pod pe tranzistoarele de siliciu
Strângeți un driver de motor DC simplu (sau pentru a vâna motorul pas cu pas) pe tranzistoarele comune de siliciu.
![]()
Smochin. 2. Schema schematică Driver de motor electric simplu pe tranzistoarele de siliciu.
Un astfel de driver vă permite să controlați motorul DC cu o tensiune de alimentare de până la 25V (pentru CT817A, KT816A) și până la 45V (pentru CT817B-G, KT816B-G) fără cel mult 3A. Cu un curent de încărcare mare al motorului, tranzistoarele de ieșire ale KT817 și KT816 trebuie să fie instalate pe radiatoare suficiente.
Este necesară instalarea diodelor Vd1-Vd2, acestea sunt necesare pentru a proteja tranzistoarele de ieșire din curentul din spate. În locul lor, puteți pune CD105a internă sau alții pentru un curent mai mare.
După colectarea a două astfel de scheme (2x6 tranzistoare), puteți controla, de asemenea, motorul de pasare sau două motoare DC.
Pentru a nu face o grădină de 12 tranzistori, puteți aplica chips-uri specializate, de mai jos, ne uităm la un exemplu cu un microcham L298 și un bloc finit pe baza acestuia.
Chip L298, caracteristici și caracteristici
Cipul integral L298 este un șofer puternic de pod universal pentru gestionarea motoarelor DC, a motoarelor pas cu pas, a releelor \u200b\u200belectromagnetice și a electromagneților (solenoizi). Microcircuitul conține două poduri H realizate pe tranzistoare puternice, precum și o logică compatibilă cu TTL.

Smochin. 3. Cipul L298 în incintele multiwatt15 PowerSO20.
Specificații de bază:
- Tensiune de operare - până la 46V;
- Curentul permanent maxim - 4a (cu radiator);
- Tensiune scăzută de saturație;
- Protecția supraîncălzită;
- Logic "0" \u003d tensiune de până la 1.5V.
Unde pot aplica driverul pe chipul L298? - mai multe idei:
- Controlul motorului;
- Controlul a două motoare DC (motoare DC);
- Comutarea bobinelor de relee puternice;
- Controlul solenoidelor (electromagneți).
Dacă vă uitați la diagrama bloc a cipului L298, atunci putem vedea ceva pe similitudinea schemei din Figura 2, numai cu elemente logice suplimentare.

Smochin. 4. Diagrama de microcircitate L298N internă este un puternic H-pod dublu.
Pentru fiecare pod H, avem 3 intrări: in1 - pentru alimentarea cu tensiune într-o singură direcție, in2 - în contrariul și o altă intrare pentru alimentarea cu energie a tranzistoarelor de ieșire ale podului.
În acest fel, putem seta direcția de trecere și de control (activată sau dezactivată, precum și PWM).
Circuitul șoferului pe chipul L298
Mai jos este o schemă simplă pentru driverul motorului de pe microcircuitul L298N. Managementul se desfășoară în patru fire (în loc de șase în L298) prin utilizarea invertoarelor suplimentare în cipul CD4011.

Smochin. 5. Diagrama schematică a driverului motoarelor electrice pe cipul L298N.
Pentru a alimenta logica ambelor jetoane, tensiunea stabilizată este + 5V (P2), puteți utiliza un stabilizator integrat, de exemplu L7805 sau să alimentați logica de la linia de alimentare existentă + 5V. Pentru a alimenta tensiunea de alimentare la motoare, se utilizează o linie de alimentare P1 separată.
P4, concluziile P5 sunt utilizate pentru a seta polaritatea fiecăruia dintre canale, iar concluziile P6, P7 sunt lăsate să furnizeze puterea la cascade (tastele) podului H intern pentru fiecare canal.
Cipul CD4011 poate fi înlocuit cu K176L7 intern. Diodele Schottky pot fi plasate un alt nominal nominal, 35V / 4A sau mai mult. Dacă nu intenționați să limitați curentul de înfășurare a motorului (motoarele), atunci rezistențele de limitare scăzută R9-R10 pot fi excluse din circuit, înlocuindu-le pe jumperi.
Pe Internet, puteți să comandați un modul gata pe L298, deși va fi 6 intrări pentru control.

Smochin. 6. Module gata pe L298.
Pentru nevoile mele, am cumpărat un modul gata făcute de tip ca în imaginea din stânga. Are un cip L298 și un stabilizator mic pentru hrănire + 5V la logica cipului.
Pentru a conecta această eșarfă, este important să înțelegeți clar o caracteristică:
- Dacă tensiunea este utilizată pentru a alimenta motoarele mai mult de 12V, atunci jumperul trebuie îndepărtat și servit separat 5V pe conectorul evidențiat pentru aceasta.
- Dacă puterea motoarelor va fi efectuată de la tensiune 5-12V, atunci jumperul trebuie să urce și nu este necesară o putere suplimentară.
Dacă vă trimiteți la motoare, de exemplu, 20V și lăsați instalat jumperul, atunci stabilizatorul microcip este dezinstalat pe modul. De ce dezvoltatorii nu au stabilit un stabilizator integrat cu o gamă mai largă de tensiuni de intrare - nu este clar.
Pentru a salva două intrări la conectarea unui astfel de bloc la Arduino sau Raspberry Pi, puteți adăuga o parte a circuitului pe CD4001, ca în Figura 5.
Motoarele L298 + DC + Raspberry Pi
Pentru acest experiment, două motoare DC au fost conectate la modulul L298. Puterea întregului modul este efectuată de la o baterie la 6V. Deoarece aceasta este o tensiune mai mică de 12V (ne uităm la descrierea de mai sus), atunci jumperul stabilizatorului intern este lăsat la instalat și nu va fi necesară o putere suplimentară + 5V pentru logică.
Jumpers "ENA" și "ENB", care permit alimentarea cu energie a podurilor de ieșire, sunt lăsate instalate. Astfel, pentru a controla fiecare motoare folosim celelalte patru intrări: in1, in2, in3, in4.
După conectarea alimentării, LED-ul va porni modulul, acum putem aplica pentru fiecare dintre intrările alternativ + 5V și vedeți cum se vor roti motoarele noastre.
Unde să obțineți + 5V? - In. acest caz Această tensiune este prezentă pe conectorul de alimentare, spre dreapta lângă GND. Pentru testul puteți utiliza o bucată de jumper de sârmă.
Acum conectați modulul nostru la Raspberry Pi și scrieți un simplu program de testare pe Python. Pentru a conecta modulul, am folosit concluziile GPIO aici în această corespondență:

Smochin. 7. L298 + Raspberry Pi + DC Electric Motors.
Mini-calculatorul este alimentat printr-un stabilizator de puls de coborâre din cea de-a doua baterie pentru 6V. Să ne întoarcem la scrierea unui program pentru experimentul nostru, scopul nostru este de a controla rotația arborelui fiecăruia dintre motoare folosind tastatura care este conectată la Raspberry Pi sau de la distanță de SSH, VNC.
Încercați acum pe un program simplu scris pe Python, care va ajuta la înțelegerea principiului de control al motorului electric DC.
Încărcați Malinka, deschideți terminalul sau conectați-l la acesta utilizând de la distanță SSH. Creați un fișier nou și deschideți-l pentru a edita utilizând comanda:
Nano /home/pi/l298_dc_motors_test.py.
Introduceți codul de script la codul Python la editor, care este afișat mai jos:
#! Gpio.cleanup () gpio.setmode (gpi.bcm) gpi.setup (4, gpio.out) gpi.output (4, gpio.low) gpi.setup (17, gpio.out) gpi.output (17, gpio .Low) # Rotiți rotația motorului 1 la o parte. Gpi.output (4, gpi.high) # Asteptam 5 secunde. Time.Sleep (5) # Opriți motorul 1. GPIO.OUTPUT (4, GPIO.LOW) # Așteptăm 10 secunde. Time.Sleep (10) # Rotiți rotația motorului 1 la cealaltă parte. Gpi.output (17, gpio.high) # așteptăm 5 secunde. Time.Sleep (5) # Opriți motorul 1. Gpio.output (17, gpio.low)
Lăsăm editorul și salvați fișierul. Facem scriptul executabil și o rulați:
Chmod + x /home/PI/L298_DC_MOTORS_TEST.PY /HOME/PI/L298_DC_MOTORS_TEST.PY
După pornirea scenariului, unul dintre motoare va începe să rotească într-o singură direcție timp de cinci secunde, apoi se oprește și după 10 secunde va începe să rotească în cealaltă parte timp de 5 secunde.
Mai jos este un exemplu mai complex și funcțional al unui program care va interacționa cu utilizatorul și vă va permite să controlați interactiv cele două motoare electrice. Similar cu primul script, programul poate fi salvat în același fișier sau nou creat separat.
Este important ca mijloacele să urmeze acest exemplu, am scris deja despre acest lucru înainte.
#! / USR / BIN / ENV Python # - * - Coding: UTF-8 - * - Import OS Import Sys Import blesteme Import Timp Import RPI.GPIO ca GPIO # Instalați numerele de pini GPIO cu care vom lucra m1_right \u003d 4 m1_left \u003d 17 m2_right \u003d 27 m2_left \u003d 22 # Funcția pentru prepararea PINS GPIO DEF SETUP (* PORTS): GPIO.CLEANUP () # Pins Modul de numire după nume, și nu după numărul pe placa GPIO.SETMODE (GPIO.BCM) pentru port În porturi: # Instalarea de Pina pe ieșire + nivel scăzut "0" gpio.setup (port, gpio.out) gpi.output (port, gpio.low) # Funcția pentru instalare nivel scăzut Pe toate pinul (oprire) Def Stop_all (): gpi.output (m1_left, gpio.low) gpi.output (m1_right, gpio.low) gpi.output (m2_left, gpio.low) gpi.output (m2_right, gpio.low ) Funcția de a controla rotația motoarelor de rotire DEF (motor \u003d 1, MODE \u003d "S"): # Opriți toate PIN-urile Stop_all () # pentru motorul 1 dacă motorul \u003d\u003d 1: Dacă modul \u003d\u003d "R": # Instalați un nivel înalt pe M1_Right (4) pin (M1_Right, GPIO.High) ELIF MODE \u003d\u003d "L": # Instalați nivelul înalt pe M1_Left (17) pin .output (M1_Left, GPIO.High) # pentru ELIF Motor 2 Motor \u003d\u003d 2: Dacă modul \u003d\u003d "R": GPIO.Output (M2_Right, GPIO.High) ELIF Mode \u003d\u003d "L": GPIO.OUTPUT (M2_LEFT, GPIO.HIPHIGH) # Efectuați inițializarea PINS GPIO Setup ( M1_right, m1_left, m2_right, m2_left) # Lock inițializare (blesteme) stdscr \u003d blestes.initscr () # reaction la apăsarea tastelor fără confirmare utilizând Enter burses.cbreak () # Permiteți utilizarea arzătorului pe tastatura STDSCR.Keypad (1 ) # Nu blocați programul la timp la op Evenimente Evenimente STDSCR.Nodelay (1) # Afișează datele implicite de pe STDSCR.Addstr (0, 10, "Hit" Q "pentru a renunța") STDSCR.Addstr (2, 10, "A - M1 Stânga, D - M1 Dreapta ") stdscr.addstr (3, 10,"< - M2 Left, > - M2 dreapta ") stdscr.addstr (4, 10," s - oprire ") stdscr.refresh () # ciclu principal în timp ce TRUE: # Obțineți codul de apăsare cheie și verificați tasta \u003d stdscr.getch () dacă tasta! \u003d - 1: # În cazul în care "săgeată stânga", apoi rotiți motorul 2 stânga dacă tasta \u003d\u003d blestes.key_left: # Afișează șirul "M2<---" в позиции 6, 10 stdscr.addstr(6, 10, "M2 <---") rotate(2, "l") # Если клавиша "стрелка вправо" то вращаем движок 2 вправо elif key == curses.KEY_RIGHT: stdscr.addstr(6, 10, "M2 --->") Rotiți (2," R ") # Dacă tasta" A "se rotește motorul 1 la tasta ELIF stânga \u003d\u003d Ord (" A "): STDSCR.Addstr (6, 10," M1<---") rotate(1, "l") # Если клавиша "d" то вращаем движок 1 вправо elif key == ord("d"): stdscr.addstr(6, 10, "M1 --->") Rotiți (1," R ") # Dacă tasta" S ", apoi opriți toate tastele ELIF motor \u003d\u003d Ord (" S "): stdscr.addstr (6, 10," stop 12 ") stop_all () # Dacă cheia "S", atunci plecăm de la cheia ELIF \u003d\u003d Ord ("Q"): # recuperarea setărilor anterioare ale terminalului STDSCR.Keypad (0) Burses.echo () blestes.endwin () # Curățare și ieșire os.system ("clar") sys.exit () # actualizați textul pe ecran și faceți o mică latență de stdscr.refresh () timp.sleep (0.01)
Prin rularea scenariului, este posibil să aveți nevoie să submineați săgeata tastaturii "Stânga" și "la dreapta", precum și cheile cu literele "A" și "D" - motoarele trebuie să se rotească alternativ și în direcții diferite , iar programul își va afișa modul de funcționare curent.
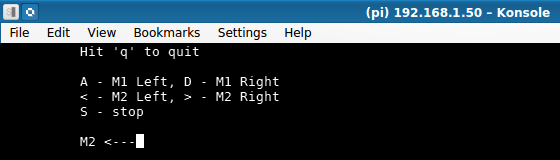
Smochin. 8. Program pe Python pentru a controla motoarele folosind driverul L298 (terminalul Konsole, KDE).
O scurtă demonstrație video a funcționării acestui experiment este prezentată mai jos:
Ce este un motor pas cu pas, tipuri de capete
Motorul pasului (Pentru cei care nu știu) - acesta este un motor electric în care nu există perii și înfășurări pe stator (ancora), ele sunt prezente pe rotor și sunt plasate astfel încât să le conecteze fiecăruia la putere Sursă Realizăm fixarea rotorului (luăm cu un pas). Dacă alimentați alternativ tensiunea la fiecare înfășurări cu polaritatea necesară, este posibil să forțați motorul să se rotească (pentru a face pași secvențiali) în direcția dorită.
Motoarele pas cu pas sunt fiabile, purtați rafturi și vă permit să controlați rotația într-un anumit unghi, aplicați în automatizarea proceselor, în producție, în echipamente electronice de calcul (unități CD-DVD, imprimante, copiatoare) și altele asemenea.
Astfel de motoare sunt următoarele tipuri:
- Bipolar - 2 înfășurări, una prin fiecare fază, poate fi utilizată pentru a controla circuitul pe podul de 2 H sau un semi-pod cu putere bipolară;
- Unipolar - 2 înfășurări, fiecare cu un robinet de la mijloc, este convenabil să comutați fazele prin schimbarea jumătăților fiecăruia dintre înfășurări, simplifică diagrama șoferului (4 cheie), precum și utilizarea ca capolar fără utilizarea de înfășurare robinete;
- Cu înfășurări marcate - Universal, conectarea înfășurărilor poate fi utilizat în mod corespunzător ca un motor capolar sau unipolar.

Smochin. 9. Tipuri de motoare pas cu pas: bipolar, unipolar, cu patru înfășurări.
Este posibil să se determine tipul de motor utilizat, de regulă, de numărul de concluzii privind cazul său și nu va face rău să cheme toate concluziile cu un tester pentru a determina dacă există tulburări între înfășurări.
L298 + Engine Stepper + Raspberry Pi
Acum, să conectăm motorul de pasare, în cazul meu, se aplică un motor de pas cu pas bipolar extras din vechea imprimantă matrice.
Pentru a conecta un motor bipolar, veți avea nevoie de două ieșiri de driver pe L298 (două poduri H). Pentru acest experiment, modulul L298 trebuie să fie conectat la Raspberry Pi, precum și la S.
Anterior, puteți experimenta fără Malinka - pentru a servi alternativ pe intrările tensiunii modulului L298 5V și vedeți cum arborele motorului va efectua pașii.
În esență, cu Malinka, vom fi alternativ și cu o anumită întârziere pentru a furniza impulsuri pe înfășurarea motorului decât pentru a forța arborele să se rotească în direcția de care am nevoie și la viteza potrivită.

Smochin. 10. Conectarea unui motor bipolar pas cu pas la modulul L298 pentru a controla prin Raspberry Pi.
Dacă totul este deja conectat, ne întoarcem la experimente cu un simplu program de testare pe Python, care vă va ajuta să înțelegeți cum să lucrați cu un motor pas cu pas folosind L298 + Raspberry Pi.
Creați un fișier pentru script și deschideți-l pentru a edita:
Nano /home/pi/l298_stepper_motor_test.py.
Introduceți următorul cod de script la editor pe Python :
#! / USR / BIN / ENV Python # - * - Codificare: UTF-8 - * - Timp de import Importul RPI.GPIO ca GPIO # Pregătiți PIN GPIO. Gpio.cleanup () gpio.setmode (gpi.bcm) gpi.setup (4, gpio.out) gpi.output (4, gpio.low) gpi.setup (17, gpio.out) gpi.output (17, gpio .Low) GPIO.Setup (27, GPIO.OUT) GPIO (27, GPIO.LOW) GPIO.Setup (22, gpio.out) gpi.output (22, gpio.low) # întârziere de timp între pași, sec . Step_Timeout \u003d 0.0105 # Durata pulsului, sec. Impulse_timeout \u003d 0.008 # Pasul 1. GPIO.Output (4, gpio.high) Time.Sleep (Impulse_Timeout) GPIO.Output (4, gpio.low) Time.Sleep (Step_Timeout) # Pasul 2. GPIO.Output (17, GPIO .High) Time.Sleep (Impulse_Timeout) GPIO.Output (17, gpio.low) Time.Sleep (Step_Timeout) # Pasul 3. GPIO.Output (27, GPIO.High) Time.Sleep (Impulse_Timeout) GPIO.Output (27 , Gpio.low) timp.sleep (step_timeout) # pas 4. gpio.output (22, gpio.high) timp.sleep (impulse_timeout) gpi.output (22, gpio.low) timp.sleep (step_timeout) # suntem Așteptați 10 secunde. Timp.Sleep (10) # 20 de ori 4 pași în ciclu. Pentru i în raza de acțiune (0.20): gpi.output (4, gpi.high) timp.sleep (impulse_timeout) gpi.output (4, gpio.low) time.sleep (step_timeout) gpi.output (17, gpio. Ridicat) Time.Sleep (impulse_timeout) gpi.output (17, gpio.low) timp.sleep (step_timeout) gpi.output (27, gpio.high) timp.sleep (impulse_timeout) gpi.output (27, gpio.low) timp. Sleep (Step_Timeout) GPIO.Output (22, GPIO.High) Time.Sleep (Impulse_timeout) GPIO.Output (22, gpio.low) Time.Sleep (Step_Timeout)
Facem un fișier cu un script executabil și o rulați pe execuție:
Chmod + x /home/PI/L298_STEPPER_MOTOR_TEST.PY /HOME/PI/L298_STEPPER_MOTOR_TEST.PY
ductul de script, motorul de pasare trebuie să facă 4 pași (rotație într-o direcție), apoi așteptați timp de 10 secunde, va începe din nou rotația și va face 20 * 4 pași.
Acum luați în considerare un exemplu de program interactiv care vă permite să controlați direcția și viteza de rotație (pașii secvențiali) a motorului pas cu pas folosind tastatura.
#! / USR / BIN / ENV Python # - * - Coding: UTF-8 - * - Import OS Import Sys Import blesteme Import Timp Import RPI.GPIO ca GPIO # Funcția pentru prepararea PINS GPIO DEF SETUP (* PORTS): GPIO. CleanUp () # Pins Mode denumire după nume, și nu după numărul pe bord gpi.Setmode (gpio.bcm) pentru port în porturi: Instalarea Pina la ieșire + nivel scăzut "0" gpio.setup (port, gpio.out) GPIO.OUTPUT (PORT, GPIO.LOW) # Funcția pentru hrănirea unui impuls la un cod PIN cu o anumită întârziere (1 pas) delicios (port \u003d 0): gpi.output (port, gpio.high) # setați valoarea de expirare la Fii un Thieugh pentru un pas Time.Sleep (0.008) GPIO.OUTPUT (PORT, GPIO.LOW) TIME.SLEEP (Timeout) # Realizăm instalarea PINS GPIO Setup (4, 17, 27, 22) # întârziere între Timpul de etape (implicit) \u003d 0.0105 # Direcție de rotație (implicită) Direcție \u003d "R" # Inițializare ecran (blestes Module) STDSCR \u003d Burses.initscr () # reacționează la apăsarea tastelor fără confirmare utilizând Enter Burses.cbreak () # Permiteți utilizarea arsurilor pe STDSCR.AKYPAD Tastatură (1) # Nu blocați programul de timp atunci când văzuiți evenimentul STDSCR.Nodelay (1) # afișarea pe ecran în mod implicit STDSCR.Addstr (0, 10, "Hit" Q "pentru a renunța") STDSCR. (2, 10, "---\u003e") stdscr.addstr (3, 10, "timeout:" + str (timeout)) stdscr.refresh () # ciclu principal, în timp ce este adevărat: # set de impulsuri pentru a roti arborele motor la dreapta dacă direcția \u003d\u003d "R": impuls (4) impuls (27) impuls (22) # set de impulsuri pentru a roti arborele motorului în direcția ELIF stânga \u003d\u003d "L": Impuls ( 22) Impuls (27) Impuls (17) Impuls (4) # Citiți codul de apăsare cheie și verificați tasta \u003d stdscr.getch () dacă tasta! \u003d -1: # tasta "stânga" modifică direcția de rotație: stânga Dacă tasta \u003d\u003d blestes.key_left: # afișează textul "<---" в позиции экрана 2, 10 stdscr.addstr(2, 10, "<---") # Изменим значение переменной с направлением вращения direction = "l" # Клавиша "вправо" меняет направление вращения: ВПРАВО elif key == curses.KEY_RIGHT: stdscr.addstr(2, 10, "--->") Direcție \u003d" R "# #" Up "Tasta accelerează rotația tastei ELIF \u003d\u003d blestes.key_up: # Reduceți întârzierea dintre pașii Timeout \u003d Timeout - Tasta 0.0005 #" Down "încetinește rotirea tastei ELIF \u003d \u003d Blestes.key_down: # Creșteți întârzierea dintre pașii Timeout \u003d Timeout + tasta 0.0005 # Q Efectuează ieșirea din tasta ELIF \u003d\u003d Ord ("Q"): stdscr.keypad (0) blestes.echo () blestes.endwin ( ) System ("clar") sys.exit () # aspect, astfel încât timpul de întârziere nu a trecut frontiera 0 dacă timeout-ul<= 0: timeout = 0.0005 # Обновляем текст на экране stdscr.addstr(3, 10, "Timeout: " + str(timeout)) stdscr.refresh() time.sleep(0.01)
Acum avem tastele săgeată stânga stânga și dreapta și ne uităm la modul în care se va schimba direcția de rotație a arborelui motorului și când tastele sunt presate în sus și în jos, viteza va crește și scade corespunzător.
Dacă motorul nu se rotește, este posibil ca acesta să fie posibilă modificarea polarității conexiunii unuia dintre înfășurări la modulul pe L298.

Smochin. 11. Programul Bipolar Stepper Motor Management, L298, Raspberry Pi.
Demonstrarea video a muncii motorului pas cu pas:
Concluzie
Sper că aveți un răspuns la întrebarea "Ce este un pod H și cum funcționează", din experimentele ar trebui să fie clar cum să aplicați driverul pe chipul L298 și să conectați diferite motoare la acesta.
Este important să rețineți că pe Internet puteți găsi biblioteci și scripturi gata pe Python pentru controlul motoarelor ușoare utilizând H-Bridge pe L298 utilizând Raspberry Pi.
- Deși motoarele de pas cu pas bipolar sunt relativ la drum, pentru dimensiunile lor fizice, ele oferă un cuplu mare. Cu toate acestea, pentru două înfășurări ale motorului, sunt necesare opt tranzistoare de control, conectate în patru poduri H. Fiecare tranzistor trebuie să reziste la suprasarcină și scurtcircuite și să restabilească rapid performanța. Un șofer, respectiv, necesită scheme complexe de protecție cu un număr mare de componente pasive.

Imaginea 1.
Figura 1. Un cip în carcasa de instalare superficială și mai multe componente pasive pot controla un motor pas cu pas bipolar.
Gestionarea motorului bipolar pas cu pas
Stepper Drive Driver cu propriile mâini - Figura 1 prezintă o diagramă alternativă a driverului de motor bazată pe amplificatorul audio al lui Maxim. Microcircuitul MAX9715 din carcasa miniaturală pentru montarea pe suprafață poate fi dată la 2,8 W într-o sarcină tipică de 4 sau 8 ohmi. Fiecare dintre cele două chipset-uri sunt formate din poduri H de la MOSFET puternic, perechi de control de linii Outtr +, Outtr și Outl +, care sunt conectate la înfășurări A și, respectiv, într-un motor pas cu pas. Fiecare pereche generează un semnal de impuls diferențial modulat cu o frecvență nominală de comutare de 1,22 MHz. Un nivel mic de interferență, creat de schemă, elimină necesitatea filtrelor de ieșire.
Condensatori de joncțiune
Condensatoarele C1, C3, C4 și C6 servesc ca o schimbare pentru intrările de putere și offset, iar C5 și C7 efectuează funcții de stocare pentru amplificatoare puternice de ieșire din clasa D. Condensatoare C8 și C9 limitează lățimea de bandă a amplificatorului la 16 Hz și feritul Beads L2 și L3 slăbesc interferențele electrice inspectate pe cabluri lungi. Filtru în formă de P C1, C2, L1 suprimă interferența la intrarea cipului IC1. Semnalele de intrare ale Step_a și Pasul, Control, respectiv, canalele din dreapta și din stânga ale motorului pot fi formate de orice controler adecvat. Lanțurile interne protejează amplificatorul de la scurtcircuite și supraîncălzirea în cazul unei defecțiuni a unui motor pas cu pas sau a unei conexiuni incorecte a concluziilor sale.

tabelul 1
Ilustrație a unei secvențe de impulsuri
Tabelul 1 ilustrează o secvență de impulsuri Step_a și Step_b care controlează rotația unui motor tipic de stepper într-o direcție prin alimentarea continuă a combinațiilor de semnal de la 0 la 4. Pasul 4 returnează arborele motorului în poziția inițială, completând cifra de afaceri de 360 \u200b\u200b°. Pentru a schimba direcția de rotație a motorului, începeți să formați o diagramă de impuls temporar din partea inferioară a mesei și să vă deplasați în sus. Dining o tensiune la nivel logic scăzut la intrarea Shdn a cipului (ieșire 8), puteți dezactiva ambele canale ale amplificatorului. Formele de semnale la intrările și ieșirile circuitului sunt prezentate în figura 2.







