Stručný úvod do teorie a typů ovladačů, tipy na výběr optimálního ovladače pro krokový motor.
Pokud chceškoupit řidič můstek , klikněte na informátor vpravo
Některé informace, které vám mohou pomoci vyberte řidič můstků.
Krokový motor - motor s komplexním regulačním schématem, který vyžaduje speciální elektronické zařízení - Stepper Drive Driver. Ovladač odrazovacího motoru přijímá logické signály krok / DIR, které jsou zpravidla reprezentovány vysokou a nízkou úrovní podpůrného napětí 5 V a v souladu s výslednými signály mění proud v vinutí motoru, což nutí hřídel Otáčejte ve vhodném směru do zadaného úhlu. \u003e Signály STEP / DIR jsou generovány CNC regulátorem nebo osobním počítačem, který spouští řídicí program Mach3 nebo LinuxCNC.
Úkolem řidiče je měnit proud vinutí co nejúčinněji, jak je to možné, a protože indukčnost vinutí a rotor hybridního krokového motoru neustále zasahovat do tohoto procesu, řidiči jsou od sebe velmi odlišní od sebe s jejich charakteristikami a kvalitu výsledného pohybu. Proud tekoucí ve vinutí určuje pohyb rotoru: aktuální hodnota nastavuje točivý moment, jeho dynamika ovlivňuje jednotnost atd.
Typy (typy) SD ovladače
Ovladače jsou rozděleny metodou stahování proudu v navíjení do několika typů:
1) Ovladače suchého napětí
Tyto ovladače se střídavě přivádějí konstantní úroveň napětí na vinutí, výsledný proud závisí na odolnosti vinutí a při vysokých rychlostech - a z indukčnosti. Tyto ovladače jsou extrémně neúčinné a mohou být použity pouze při velmi nízkých rychlostech.
2) Duplexní ovladače
V ovladačích tohoto typu je proud ve vinutí nejprve stoupá na požadovanou úroveň s použitím vysokého napětí, pak je zdroj vysokého napětí vypnutý a požadovaný proud je udržován zdrojem nízkého napětí. Takoví řidiči jsou mimo jiné poměrně účinné, snižují ohřev motorů a mohou se stále scházet ve vysokotřídlých zařízeních. Takové ovladače jsou však podporovány pouze krokem a polotovarem.
3) Ovladače pšenice.
V současné době jsou řidiči Stepper Motors nejoblíbenější, téměř všechny řidiče na trhu - tento typ. Tyto ovladače jsou předloženy k navíjení krokového motoru PWM signálu velmi vysokého napětí, který je odříznut tak, aby se dosáhlo aktuální úrovně. Hodnota proudu, pro kterou je vypnutý, je nastavena buď potenciometrem nebo přepínačem DIP, někdy je tato hodnota naprogramována pomocí speciálního softwaru. Tyto ovladače jsou poměrně intelektuální a jsou vybaveny různými dalšími funkcemi, podporují různé divize rozteče, což umožňuje zvýšit diskrétnost polohování a hladkosti. Řidiči PWM jsou však také velmi odlišní od sebe. Kromě vlastností, jako jsou napájecí napětí a maximální navíjecí proud, liší se v frekvenci PWM. Je lepší, pokud frekvence řidiče je více než 20 kHz, a obecně, než je více - tím lépe. Frekvence pod 20 kHz zhoršuje jízdní vlastnosti motorů a spadá do slyšitelného rozsahu, krokové motory začnou dělat nepříjemný pík. Řidiči krokových motorů po samotných motorech jsou rozděleny na unipolární a bipolární. Startovací stroje důrazně doporučujeme experimentovat s pohony, ale zvolit ty, na kterých můžete získat maximální množství technické podpory, informací a pro které jsou produkty na trhu nejvíce široce prezentovány. Takové jsou ovladače bipolárních hybridních krokových motorů.
Jak zvolit řídicí jednotku pro kroky (SD)
První parametrCož stojí za to věnovat pozornost, když se rozhodnete vybrat řidič odrazového můstku - to je síla proudu, který může řidič poskytnout. Zpravidla je nastavitelná na poměrně široký rozsah, ale stojí za to, aby řidič potřeboval zvolit tak, že může způsobit proud rovný aktuální fázi vybraného kroku motoru. Je žádoucí, samozřejmě, že maximální řidič řidiče je další o 15-40% více. Na jedné straně to dá zásobu v případě, že chcete získat větší moment z motoru, nebo v budoucnu dát více než výkonný motorNa druhou stranu nebude nadměrná: výrobci někdy "přizpůsobit" ratingy rádiových elektronických součástek na jeden nebo jiný typ / velikost motorů, takže příliš silný ovladač pro 8 A, ovládání motoru NEMA 17 (42 mm) ), může například způsobit zbytečné vibrace.
Druhý okamžik - Toto je napájecí napětí. Velmi důležitý a nejednoznačný parametr. Jeho vliv je poměrně mnohostranný - napájecí napětí ovlivňuje dynamiku (v okamžiku vysoké revoluce), Vibrace, topení motoru a ovladače. Obvykle je maximální napájecí napětí přibližně stejné maximálnímu proudu, které jsem násobil 8-10. Pokud je maximální specifikovaný napájecí napětí ovladače ostře odlišný od těchto hodnot - je nutné dále zeptat, jaký je důvod takového rozdílu. Čím větší je indukčnost motoru - pro řidiče je vyžadováno více napětí. Existuje empirický vzorec U \u003d 32 * SQRT (L), kde L je indukčnost odstupňovacího motoru. Hodnota U, získaná podle tohoto vzorce, je velmi přibližná, ale umožňuje navigaci, když je ovladač vybrán: u by se měl přibližně rovnat maximální platné hodnoty ovladače. Pokud jste obdrželi u 70, pak EM706, AM882, ovladače YKC2608M-H procházejí toto kritérium.
Třetí aspekt - přítomnost projevených vstupů. Téměř ve všech řidičích a regulátorech vyráběných v továrnách, všechnější značka, tluorie je vyžadována, protože řidič je elektrický elektronický přístroj, a klíčová přestávka může vést k silnému pulsu na kabely, pro které jsou řídicí signály krmeny, a Vyhoření drahý CNC regulátor. Pokud se však rozhodnete vybrat přehrávač SD ovladače, je nutné dále požádat přítomnost vstupů a výstupů.
Čtvrtý aspekt - přítomnost mechanismů potlačování rezonancí. Rezonance krokového motoru je fenomén, který se vždy projevuje, rozdíl je pouze v rezonanční frekvenci, která závisí především na momentu setrvačnosti zátěže, napájecího napětí řidiče a pevnosti na fázi motoru. Pokud se objeví rezonance, krokový motor začne vibrovat a ztrácí točivý moment, až k úplnému zastavení hřídele. Pro potlačení rezonance se používají mikrobky a - vestavěné algoritmy kompenzace rezonance. Krokovací motor kromečného motoru vytváří mikrokolentu indukce EMF v vinutí a jejich charakterem a amplitudou, řidič určuje, zda je rezonance a jak silný je. V závislosti na přijatých dat se řidič vysouvá mírně motorové kroky v čase vzhledem k sobě - \u200b\u200btakové umělé nerovnoměrné úrovně rezonance. Mechanismus potlačení rezonance je zabudován do všech\u003e Leadshine řidičů DM, AM a EM. Řidiči s potlačení rezonancí jsou vysoce kvalitní ovladače, a pokud vám rozpočet umožňuje lépe vzít. Bez tohoto mechanismu však řidič zůstává docela pracovním zařízením - objem prodaných řidičů - bez kompenzace rezonance, a přesto desítky tisíc strojů pracují bez jakýchkoliv problémů po celém světě a úspěšně splnit jejich úkoly.
Pátý aspekt - protokolová část. Musíte se ujistit, že řidič pracuje na protokolu, který potřebujete, a úrovně vstupních signálů jsou kompatibilní s požadovanými logickými úrovněmi. Tato kontrola je pátá položka, protože se vzácnou výjimkou, ohromující počet ovladačů pracuje přes Step / Dir / Enable a je kompatibilní s úrovní signálu 0..5 V, musíte se ujistit.
Šestý aspekt - přítomnost ochranných funkcí. Mezi nimi je ochrana před přebytkem napájecího napětí, proudu vinutí (vč. Od zkratu vinutí), z reverzace napájecího napětí, z nesprávného spojení fází kroku motoru. Čím více takových funkcí - tím lépe.
Sedmý aspekt - přítomnost micro-posunutí režimů. Teď téměř v každém řidiči existuje mnoho mikrokručních režimů. Z každého pravidla však existují výjimky a v geckodrive ovladače pouze jeden krok 1/10. To je motivováno tím, že více divize nepřináší větší přesnost, což znamená, že není potřeba. Praxe však ukazuje, že mikrosgge vůbec není vůbec zvyšovat diskrétnost polohování nebo přesnosti, ale tím, že čím větší je rozdělení kroku, hladký pohyb hřídele motoru a méně rezonance. V souladu s tím, všechny ostatní věci jsou stejné podmínky, stojí za to využít rozdělení než více, tím lépe. Maximální přípustné krokové divize bude stanoveno nejen tabulek Brady zabudovaných do řidiče, ale také maximální frekvence vstupních signálů - takže pro řidiče se vstupní frekvencí 100 kHz, to nemá smysl použít divizi 1 / 256, protože rychlost otáčení bude omezena na 100 000 / (200 * 256) * 60 \u003d 117 ot / min, což je pro krokový motor velmi malý. Kromě toho bude osobní počítač také sotva schopen generovat signály s frekvencí více než 100 kHz. Pokud neplánujete používat hardwarový CNC regulátor, pak je 100 kHz s největší pravděpodobností váš strop, který odpovídá divizi 1/32.
Osmý aspekt - přítomnost dalších funkcí. Může být spousta z nich, například definiční funkce "poruchy" - náhlé zastavení hřídele, když je točivý moment zaseknutý nebo postrádající krokový motor, výstupy pro externí indikaci chyb, atd. Všechny z nich nejsou nutné, ale může výrazně zmírnit život při budování stroje.
Devátý a nejdůležitější aspekt- řidič kvality. Prakticky není spojen s vlastnostmi atd. Existuje mnoho návrhů na trhu, a někdy charakteristika řidičů dvou výrobců se shodují téměř do čárky, a zapnout je na obratu stroje, je zřejmé, že jeden z výrobců se zjevně nezabývá svým podnikáním a Ve výrobě levných žehličích je šťastnější. Určete úroveň řidiče předem za určitý druh nepřímých dat je pro nováčku poměrně obtížná. Můžete se pokusit zaměřit na počet inteligentních funkcí, například "Stall Detect" nebo potlačování rezonance, stejně jako použití prokázané metody - pro navigaci na značkách.
Článek prezentuje základní schémata možností pro jednoduchý, levný korekční regulátor můstek a rezidenta software (firmware) pro něj.
Obecný popis.
Regulátor odrazového můstku je navržen na regulátoru PIC112F629. To je 8 výstupní mikrokontrolér v hodnotě celkem 0,5 USD. I přes jednoduché schéma a nízké náklady na komponenty, regulátor poskytuje poměrně vysoké charakteristiky a širokou funkčnost.
- Regulátor má možnosti pro ovládání jak unipolární, tak bipolární chůze motor.
- Poskytuje nastavení otáček motoru v širokém rozsahu.
- Má dva kroky řídicí režimy:
- plný krok;
- hemisfan.
- Poskytuje rotaci v přímých a reverzních směrech.
- Režimy nastavení, parametry, regulace regulátoru se provádí dvěma tlačítky a na (inkluze) signálu.
- Když je napájení vypnuto, všechny režimy a parametry jsou uloženy v neajuté paměti regulátoru a nevyžadují přeinstalaci při zapnutí.
Regulátor nemá ochranu proti zkratovým obvodům vinutí motoru. Provádění této funkce komplikuje významně komplikuje schéma a uzavření vinutí je případ extrémně vzácný. Tak jsem narazil. Kromě toho mechanický doraz z šachtovacího hřídele motoru během otáčení nezpůsobuje nebezpečné proudy a ochrana ovladače nevyžaduje.
O režimech a způsobech řízení krokového motoru lze přečíst o potápěči.
Diagram regulátoru unipolárního stěrku s řidičem na bipolárních tranzistorech.

Vysvětlete ve schématu, zejména nic. Připojen k řadiči PIC:
- tlačítka "+" a "-" (přes analogový vstup komparátoru);
- na signálu (výkon motoru);
- ovladač (VT1-VT4 tranzistory, ochranné diody VD2-VD9).
Pic používá interní taktový generátor. Režimy a parametry jsou uloženy ve vnitřním EEPROM.
Diagram řidiče na bipolárních tranzistorech KT972 poskytuje spínací proud do 2 A, napětí vinutí až 24 V.
Uložil jsem regulátor na velikosti s rozměry 45 x 20 mm.

Pokud spínací proud nepřesahuje 0,5 A, tranzistory řady BC817 mohou být použity v SOT-23 skříněch. Zařízení se rozsvítí poměrně miniaturní.
Kontrola softwaru a regulátoru.
Rezidentní software je napsán na assembleru s cyklickým přeinstalováním všech registrů. Program nebude v zásadě záviset. Stáhnout software (firmware) pro PIC12F629.
Řízení regulátoru je dostačující.
- S aktivním signálem "zapnuto" (uzavřený na zemi) se motor otáčí, s neaktivním (odříznutím od země) - zastavil se.
- Když je motor spuštěn (aktivní se signál na signál), tlačítka "+" a "-" změní rychlost otáčení.
- Každé stisknutí tlačítka "+" zvyšuje rychlost na minimální diskrétnost.
- Stisknutím tlačítka "-" - snižuje rychlost.
- Při přidržení tlačítek "+" nebo "-" se rychlost otáčení zvyšuje hladce nebo snižuje o 15 hodnot diskrétnosti v sekundách.
- Když je motor zastaven (není aktivní signál na signál).
- Stisknutím tlačítka "+" nastaví režim otáčení v dopředném směru.
- Stisknutím tlačítka "-" překládá regulátor k reverznímu režimu rotace.
- Chcete-li vybrat režim, plný krok nebo polotovar potřebný, když je napájení aplikováno na regulátor, stiskněte tlačítko "-". Režim řízení motoru se změní na jiný (obrácený). Stačí vydržet tlačítko - stisknuto po dobu 0,5 sekundy.
Schéma unipolárního stepovacího motoru řadiče s řidičem na tranzistorech MOSFET.

Low-prahová hodnota MOSFET tranzistory umožňují vytvořit ovladač s vyššími parametry. Aplikace v řidiči tranzistorů MOSFET, například IRF7341 poskytuje následující výhody.
- Odolnost vůči tranzistorům v otevřeném stavu ne více než 0,05 ohmů. To znamená malý pokles napětí (0,1 V při proudu 2 A), tranzistory NEPOUŽÍVEJTE, nevyžadují chladicí radiátory.
- Tranzistorový proud až 4 A.
- Napětí do 55 V.
- V jednom 8, výstupní pouzdro SOIC-8 umístil 2 tranzistory. Ty. Provádění řidiče bude vyžadovat 2 miniaturní budovy.
Tyto parametry nelze dosáhnout na bipolárních tranzistorech. S spínacím proudem, přes 1, doporučuji verze tranzistorů MOSFET.
Připojení k regulátoru unipolárních krokových motorů.
V režimu unipolárního režimu mohou fungovat motory s konfiguracím vinutí 5, 6 a 8 vodičů.
Schéma zapojení unipolárního krokového motoru s 5 a 6 vodiči (výstupy).

Pro FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH, FL57STH, FL57STH s konfigurací vinutí 6 vodičů, závěry jsou označeny následujícími barvami.

Konfigurace s 5 vodiči je možnost, ve které jsou sdílené navíjecí vodiče připojeny uvnitř motoru. Takové motory jsou. Například PM35S-048.

Dokumentace o krokovém motoru PM35S-048 ve formátu PDF lze stáhnout.
Připojovací schéma unipolárního krokového motoru s 8 vodiči (výstupy).

Stejně jako u předchozí verze se vyskytují pouze všechna připojení vinutí mimo motor.
Jak zvolit napětí pro krokový motor.
Podle Ohmova práva prostřednictvím odolnosti proti navíjení a přípustným fázovým proudem.
U \u003d Iphazy * Robs
Lze měřit odpor navíjení DC a proud musí být podepsán v referenčních datech.
Zdůrazňujeme, že mluvíme o jednoduchých řidičích, které neposkytují komplexní proudový a napěťový formulář. Tyto režimy se používají při vysokých rychlostech otáčení.
Jak určit vinutí krokových motorů, pokud neexistují žádná referenční data.
V unipolárních motorech s 5 a 6 závěry může být průměrný výstup stanoven, měření, odolnost vůči vinutí. Mezi fázemi bude odpor dvakrát větší než mezi prostředním závěru a fází. Průměrné závěry jsou připojeny k napájení plus.
Dále může být jakákoliv z fázových závěrů přidělena do fáze A. 8, budou 8 možností pro vykreslování. Můžete projít nimi. Pokud se domníváme, že vinutí fáze B má jiný průměrný drát, pak se možnosti stávají ještě méně. Čelo vinutí fáze nevede k poruše řidiče nebo motoru. Motorové chrání a neotáčí.
Je třeba si uvědomit, že rychlost otáčení je příliš vysoká na stejný účinek (výstup ze synchronizace). Ty. Je nutné instalovat rychlost otáčení.
Bipolární odstupňovací motorový regulátor obvod s integrovaným ovladačem L298N.
Bipolární režim dává dvě výhody:
- motor může být použit s téměř jakoukoliv konfigurací vinutí;
- asi 40% zvyšuje točivý moment.
Vytvořte schéma bipolárního ovladače na diskrétních prvcích - nevděčná příčina. Je jednodušší používat integrální ovladač L298N. Popis v ruštině je.
Okruh regulátoru s Bipolárním řidičem L298N vypadá takto.

Řidič L298N je součástí standardního diagramu. Taková volba regulátoru poskytuje fázové proudy do 2 A, napětí do 30 V.
Připojení k regulátoru bipolárních odstupňovacích motorů.
V tomto režimu může být motor spojen s jakoukoliv konfigurací vinutí 4, 6, 8 vodičů.
Připojovací schéma bipolárního odstupňovacího motoru se 4 vodiči (výstupy).

Pro motory FL20Sth, FL28Sth, FL35ST, FL39ST, FL42Sth, FL57ST, FL57Sth s konfigurací vinutí 4 vodiče, závěry jsou označeny následujícími barvami.
Schéma připojení bipolárního odstupňovacího motoru s 6 vodiči (výstupy).

Pro motory FL20Sth, FL28Sth, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH s takovou konfigurací vinutí, závěry jsou označeny následujícími barvami.
Takové schéma vyžaduje napájecí napětí dvakrát ve srovnání s unipolárním začleněním, protože Odpor vinutí je dvakrát tolik. S největší pravděpodobností musí být regulátor připojen k 24 V.
Schéma připojení bipolárního odstupňovacího motoru s 8 vodiči (výstupy).
Mohou existovat dvě možnosti:
- s postupným začleněním
- s paralelním začleněním.
Schéma sériového začlenění vinutí.

Schéma s postupným otočením na vinutí vyžaduje dvakrát vyšší napětí vinutí. Ale fázový proud se nezvyšuje.
Schéma paralelního začlenění vinutí.

Schéma s paralelním zapnutím vinutí zvyšuje 2krátové fázové proudy. Výhody tohoto schématu lze připsat, nízkou indukčnost fázových vinutí. To je důležité při vysokých rychlostech.
Ty. Volba mezi sekvenčním a paralelním začleněním bipolárního krokového motoru s 8 vodiči je stanovena kritéria:
- maximální pohonný proud;
- maximální napětí řidiče;
- rychlost otáčení motoru.
Software (firmware) pro PIC12F629 lze stáhnout.
Takže myšlení řidiče na woodwickers pro bipolarnikisty, nemyslel jsem si, že toto téma by způsobilo takový zájem a budete muset napsat malý článek na shromáždění a konfiguraci. Zde bude považován za řidič jako samostatný blok. Protože Používám blokový design. Ty. Tři ovladače, deska rozhraní, napájení. Za prvé, když neuspějete jeden ovladač, ovladač se jednoduše změní na náhradní, a ve druhé (a nejdůležitějším) je plánováno být upgradováno, je pro mě jednodušší odstranit jeden ovladač a vložte upgradovanou verzi pro spuštění. "Jeden balíček" je již vývojem tématu a myslím, že odpovím otázky týkající se konfigurace UPSDJ _ Smart. A také doplnit a opravit svou práci. A teď do pouzdra ...
Položka Nejprve (nelze si přečíst poplatekJ. ). Po leptání, mezzani a vrtáky, pečlivě zkontrolovat celou desku pro JAMA. SNOT, leptané cesty atd. Může vážně zlomit celý buzz. Dále krmíte poplatek, nejprve všechny propojky, pak odpor, diody, panely, kontejnery a bipolární tranzistory. Chci kreslit speciální pozornost Pro vaši pozornost, omlouvám se za ... nebýt líný, než Pripa zkontrolovat položku pro dobrotu. TransVelca někdy šetří z kouře ... Znám barevné kódování rezistorů s třeskem, několikrát se rozběhly a speciality. Efekty. Když používáte rezistory z voštiny, roky padly ze všeho, co padnou pod paži, zapomněli jste, že když se červené topení může stát oranžovou a oranžovou - žlutou ... stáhli napájení + 5V, krok,GND. a řídicí vodičeVref. . O tomhle způsobem to vypadá:

Bod druhý (nastavit režimy provozu a držení). 555 Já osobně jdu do poplatku, který dal panel, což znamená, že zobrazovací jednotka musí být odpojena. Striptérky pro střed. Krok dodávky uzávěrem na běžném režimu (režim otroka). Nick + 5V řetězec a pokud není krátký, zapnete moc. Tester připojený k řídicích bodůmVref (dobře provedené DJ _ Smart , pokud jde o tabuli), pokud sazby tahů a odolnosti mezi nimi odpovídají schématu, pak otrok je mrtvice. Režimy mohou nastavit napětí asi 0 - 1V tj. Aktuální 0 - 5a. Znát 1a. Všechno je tady jednoduché.R. změna Máme 0,2 ohmů. Potřebujeme 1a. 0,2х1 \u003d 0,2V. Ty. Pokud instalujemeVref. - 0,2V, proud v navíjení bude 1A. Pokud potřebujeme proud v navíjení, řekněte 2,5a, pakVref \u003d 0,2х2.5 \u003d 0,5V.
Stručně řečeno, jsme nastavili 0,2V.

Teď vonící krok a společnost. Pokud jsou všechny položky normální a podle schématu, pak po otevření asi půl sekundyVref. klesne dvakrát (pokud je nastaven druhý trimr ve středuVref. Držet. Mám 50%. Ze pracovníka:

Hlavní věcí je věnovat pozornost povinnému zpoždění při přepínání. Když je krok uzavřen na obecný, provozní režim musí být okamžitě zapnutý a při otevírání je zachovat se zpožděním 0,5 ° C. Pokud neexistují žádná zpoždění, hledejte problémy, jinak nebudou při práci žádné gluhly závady. Pokud nespustíte, přejděte na téma fóra, nepřipravte požáryJ.
Bod tři (přizpůsobit indikační jednotku). Těsnění je rozvedeno do 315-361, stejně jakoDJ _ Smarta. Také taška, potřebujete někde pájet ... ale v zásadě můžete pájku libovolným párem, z našeho jsem zažil 502 - 503, 3102 - 3107, vše pluhy, jen být pozorný s kodítkem! Pokud je vše správně pájeno a pracuje, funguje bez problémů. Indikace dělá malou úpravuVref. Takže po připojení indikace konečně nastavte proud pod SHD (lépe pro startování 70% nominálního). Fotografie jako LED nejsou spálenyJ.
Klauzule Čtvrtý, Důležitý (297) Vypnutí napájení na 327 na vašem místě. Opět jsme znovu zkontrolovali instalaci a prvky páskování, pokud je vše v pořádku (s jakýmikoliv pochybnostmi dvakrát zkontrolujeme) Dáváme jídla. Kontrola osciloskopu signál na první noze, je to:

Buď na 16 nohách, to je:

To znamená, že PIEM začal, šťastný s frekvenčním měřičem může měřit frekvenci, mělo by být velmi přibližně přibližně odpovídat 20 kHz.
POZORNOST!!! To je důležité!!!I když PWM nespustí, logická část 297 bude fungovat, tj. Když je zatížení připojeno, všechny signály půjdou ... ale počítat 24V bez Shim 2. Takže je důležité se ujistit, že začne generátor mikroobvodů.
Bod pátý. Znovu vypnuto napájení a vložímIR. , Narazili jsme na woodwickers. Při použití SHD s proudem vinutí přes 2,5a je nutné vydržet zkosení k radiátoru. Upozorňujeme, kdy jsou diody posypané, mohou se lišit. Opravdu jsem se nesetkal (mám vložku 522 a 1N. 4148 (analogový) mají spolurzolevka shodovaly), ale zvažují lidiIR.
Zvažte ovladač elektromotoru na tranzistory a mikroobvodu L298, budeme se zabývat principem práce H-mostu. Naučíme se vlastnostmi připojení řidičů na L298 různých motorů A zdroje energie, budeme provádět jednoduché experimenty se krokovými motory a konstantními napětím. Připojení k Raspberry PI a nejjednodušší programy pro testování řízení ovladače.
Co je h-most
Při navrhování strojů, robotů a dalších automatizovaných zařízení je potřeba ovládat elektromotor stejnosměrný proud nebo cívky krokového motoru. Aby bylo možné ovládat vinutí motoru a provést jeho hřídel otočit v různých směrech, je nutné provést přepínání s výkupem. Pro podobný účel se používá tzv. "H-most".
Proč je takový název? - Protože spínání motorů a spínacích spínačů pro přepínání připomíná latinský dopis H. Principy provozu H-mement je ukázáno na NATRUNK pod.
Obr. 1. Jak funguje H-most, princip spínání motoru pro otáčení v různých směrech.
Jak vidíme, s pomocí 4 přepínačů můžeme připojit motor na zdroj energie v jiné polaritě, což zase způsobí, že jeho hřídel otáčejí v různých směrech. Přepínače lze nahradit relé, nebo na výkonných elektronických klících na tranzistorech.
Je důležité poznamenat, že je nemožné používat dvě klávesy na jedné straně H-mostu, protože vypne zkrat, při navrhování mostního obvodu je nutné toto pravidlo stanovit do logiky a tím si realizovat ochranu.
Schéma jednoduchého H-mostu na silikonových tranzistorech
Sbírejte jednoduchý DC motorový ovladač (nebo vítr krokový motor) na běžných silikonových tranzistorech.
![]()
Obr. 2. Schematický schéma Jednoduchý řidič motorového motoru na silikonových tranzistorech.
Takový řidič umožňuje ovládat stejnosměrný motor s napájecím napájecím napětím do 25V (pro CT817A, KT816A) a až 45V (pro CT817B-G, KT816B-G) s ne více než 3A. S velkým zatěžovacím proudem motoru musí být výstupní tranzistory KT817 a KT816 instalovány na dostatečných radiátorech.
Vyžaduje se instalace diod VD1-VD2, jsou potřebné pro ochranu výstupních tranzistorů z zadního proudu. Na jejich místě můžete dát domácí CD105a nebo jiné pro větší proud.
Po shromáždění dvou takových schémat (2x6 tranzistory), můžete také řídit krokovací motor nebo dva DC motory.
Aby nedošlo k vytvoření zahrady 12 tranzistorů, můžete aplikovat specializované čipy, pod nimi se podíváme na příklad s L298 Microchamem a hotovým blokem na základě něj.
Chip L298, vlastnosti a funkce
L298 integrální čip je silný univerzální můstkový ovladač pro správu stejnosměrných motorů, krokových motorů, elektromagnetických relé a elektromagnetů (solenoidy). Mikrocircuit obsahuje dva H-mosty vyrobené na výkonných tranzistorech, stejně jako logiku kompatibilní s TTL.

Obr. 3. L298 čip v sběrných sustech Multiwatt15 PowerSo20.
Základní specifikace:
- Provozní napětí - až 46V;
- Maximální trvalý proud - 4A (s radiátorem);
- Nízké napětí nasycení;
- Ochrana proti přehřátí;
- Logický "0" \u003d napětí do 1,5V.
Kde mohu použít řidiče na čipu L298? - Několik nápadů:
- Kontrola motorového řízení;
- Řízení dvou DC motorů (DC motorů);
- Spínací cívky silných relé;
- Ovládání solenoidů (elektromagnety).
Pokud se podíváte na blokové schéma čipu L298, pak můžeme vidět něco na podobnost schématu na obr. 2, pouze s dalšími logickými prvky.

Obr. 4. Vnitřní L298N MicroCIRCUIT Diagram je výkonný dvojitý H-most.
Pro každý H-most máme 3 vstupy: IN1 - pro napájení napětí v jednom směru, in2 - v opačném směru a dalším EN vstup pro napájení výstupních tranzistorů mostu.
Tímto způsobem můžeme nastavit směr průchodu a ovládat jej (povoleno nebo zakázáno, stejně jako pwm).
Okruh řidiče na čipu L298
Níže je jednoduchým schématem řidiče motoru na mikroobvodu L298N. Management se provádí ve čtyřech vodičích (namísto šesti v L298) pomocí přídavných střídačů v čipu CD4011.

Obr. 5. Schematický diagram řidiče elektromotorů na čipu L298N.
Pro napájení logiky obou žetonů, stabilizované napětí je + 5V (p2), můžete použít integrální stabilizátor, například L7805 nebo napájet logiku ze stávajícího napájení + 5V. Pro přivádění napájecího napětí do motorů se používá samostatný napájecí vedení P1.
P4, P5 Závěry slouží k nastavení polarity každého kanálů a závěry P6, P7 mohou dodávat napájení kaskádám (klíče) interního H-mostu pro každý kanál.
Čip CD4011 může být nahrazen domácím K176L7. Schottky diody mohou být uvedeny další nominální nominální, 35V / 4A nebo více. Pokud neplánujete omezit proud vinutí motoru (motory), pak nízkoúrovňové limitující rezistory R9-R10 mohou být vyloučeny z obvodu, které je nahrazují na propojích.
Na internetu si můžete objednat připravený modul na L298, i když to bude 6 vstupů pro řízení.

Obr. 6. Ready moduly na L298.
Pro mé potřeby jsem si koupil připravený modul podle typu jako na obrázku vlevo. Má čip L298 a malý stabilizátor pro krmení + 5V k logice čipu.
Pro připojení tohoto šátek je důležité jasně pochopit jednu funkci:
- Pokud se napětí použije pro napájení motory více než 12V, musí být propojka odstraněna a podávána odděleně 5V na konektoru zvýrazněném pro toto.
- Pokud bude napájení motorů prováděno z napětí 5-12V, musí být propojek lezení a dodatečný výkon není potřeba.
Pokud se podílete na motory, například 20V a ponechte instalovanou propojku, pak microchip-stabilizátor je na modulu odinstalován. Proč vývojáři nezavedli integrální stabilizátor s širším rozsahem vstupních napětí - není jasné.
Pro uložení dvou vstupů při připojení takového bloku k Arduino nebo Raspberry PI můžete přidat část obvodu na CD4001, jako na obrázku 5.
L298 + DC motory + malina pi
Pro tento experiment byly k modulu L298 připojeny dva DC motory. Výkon celého modulu se provádí z jedné baterie na 6V. Vzhledem k tomu, že se jedná o napětí menší než 12V (podíváme se na popis výše), pak je propojka vnitřního stabilizátoru ponechán na instalaci a další výkon + 5V pro logiku nebude vyžadován.
Jumpery "ENA" a "ENB", které umožňují napájení výstupních mostů, jsou nainstalovány. Pro ovládání každého z motorů používáme zbývající čtyři vstupy: IN1, IN2, IN3, IN4.
Po připojení napájení se LED rozsvítí modul, nyní můžeme požádat o každou ze vstupů alternativně + 5V a zjistit, jak se naše motory otáčí.
Kde se dostanete + 5V? - v tento případ Toto napětí je přítomno na napájecím konektoru, vpravo v blízkosti GND. Pro test můžete použít kus drátu - Jumper.
Nyní připojte náš modul na Raspberry PI a napište jednoduchý testovací program na Pythonu. Pro připojení modulu jsem použil závěry GPIO zde v této korespondenci:

Obr. 7. L298 + Raspberry PI + DC Elektromotory.
Mini-počítač je napájen přes snížení stabilizátoru pulzů z druhé baterie pro 6V. Obraťme se na psaní programu pro náš experiment, naším cílem je kontrolovat rotaci hřídele každého z motorů pomocí klávesnice, která je připojena k malinové pi nebo vzdáleně SSH, VNC.
Nyní zkuste jednoduchý program napsaný na Pythonu, který pomůže pochopit zásadu kontrolního principu DC elektromotoru.
Načíst Malinka, otevřete terminál nebo se k němu připojte na dálku pomocí SSH. Vytvořte nový soubor a otevřete jej upravit pomocí příkazu:
Nano /Home/pi/l298_dc_motors_test.py.
Vložte kód skriptu na kód Pythonu do editoru, který je uveden níže:
#! / Usr / bin / env python # - * - kódování: utf-8 - * - import času importu rpi.gpio jako gpio # připravit piny gpio. GPIO.CLEANUP () GPIO.SETMODE (GPIO.BCM) GPIO.SETUP (4, GPIO.OUT) GPIO.Output (4, GPIO.LOW) GPIO.SETUP (17, GPIO.OUT) GPIO.Output (17, GPIO) .Low) # Otočte otáčení motoru 1 na jednu stranu. Gpio.output (4, gpio.high) # čekáme na 5 sekund. TIME.SLEEP (5) # Vypněte motor 1. GPIO.Output (4, GPIO.LOW) # čekáme na 10 sekund. TIME.SLEEP (10) # Otočte otáčení motoru 1 na druhou stranu. GPIO.Output (17, GPIO.HIGH) # Čekáme na 5 sekund. Time.sleep (5) # Vypněte motor 1. GPIO.Output (17, GPIO.LOW)
Editor opustíme a uložíme soubor. Provedeme spustitelný soubor Script a spustíme:
CHMOD + X /Home/pi/l298_dc_motors_test.py /Home/pi/l298_dc_motors_test.py
Po spuštění skriptu se jeden z motorů začne otočit v jednom směru po dobu pěti sekund, pak se vypne a po 10 sekundách se spustí na druhé straně po dobu 5 sekund.
Níže je dále složitější a funkčním příkladem programu, který bude spolupracovat s uživatelem a umožní vám interaktivně ovládat dva elektromotory. Podobně jako první skript, program může být uložen do stejného souboru nebo nové samostatně vytvořené.
Je důležité, aby tento příklad následoval, už jsem o tom dříve napsal.
#! / Usr / bin / env python # - * - kódování: UTF-8 - * - Import OS Import Sys Import Curses Import Time Import RPI.GPio jako GPIO # Instalace čísel GPIO pinů, se kterými budeme pracovat M1_Right \u003d 4 m1_left \u003d 17 m2__right \u003d 27 m2_left \u003d 22 # Funkce pro přípravu pinů GPIO DEF SETUP (* PORTS): GPIO.CLEANUP () # PINS MODE Jméno podle názvu, a ne podle čísla na desce GPIO.SETMODE (GPIO.BCM) pro port V přístavech: # Instalace PINU na výstupu + nízké úrovni "0" GPIO.SETUP (port, gpio.out) gpio.output (port, gpio.low) # Funkce pro instalaci nízká úroveň Na všech borovic (vypnutí) def Stop_all (): GPIO.Output (M1_LEFT, GPIO.LOW) GPIO.Output (M1_Right, GPIO.LOW) GPIO.Output (M2_LEFT, GPIO.LOW) GPIO.Output (M2_Right, GPIO.LOW ) Funkce pro řízení otáčení otočných motorů DEF (Motor \u003d 1, režim \u003d "S"): # Vypněte všechny piny Stop_all () # pro motor 1, pokud motor \u003d\u003d 1: Pokud je režim \u003d\u003d "R": # Nainstalujte na vysoké úrovni na M1_Right (4) borovice (M1_Right, GPIO.HIGH) režim ELIF \u003d\u003d "L": # Nainstalujte vysokou úroveň na M1_LEFT (17) borovice. POINTPUT (M1_LEFT, GPIO.HIGH) # pro motor 2 ELIF Motor \u003d\u003d 2: Pokud je režim \u003d\u003d "R": GPIO.Output (M2_Right, GPIO.HIGH) režim ELIF \u003d\u003d "L": GPIO.Output (M2_LEFT, GPIO.HIGH) # Proveďte inicializaci nastavení PIN GPIO (Nastavení) M1_Right, M1_LEFT, M2_RIGRGE, M2_LEFT) # Zámek inicializace (Curses) StDDSCR \u003d Curscr \u003d Curscr \u003d Curscr \u003d Curscries.InitCR () # Reagovat na stisknutí kláves bez potvrzení pomocí Enter Curses.Combreak () # Povolit použití zapojení na klávesnici SDDSCR.KEYPAD (1 ) # Neoblokujte program včas v OP Události Události SDDSCr.Nodelay (1) # Zobrazení výchozích dat na výchozího stdscr.addstr (0, 10, "Hit" Q "ukončit") stdscr.addstr (2, 10, "A - M1 vlevo, D-M1 Vpravo ") stdscr.Addstr (3, 10,"< - M2 Left, > - m2 vpravo ") stdscr.Addstr (4, 10," S - stop ") stdscrefresh () # hlavní cyklus, zatímco true: # Získat klávesu stisknutí kódu a zaškrtněte it tlačítko \u003d stdscr.getch () pokud klíč! \u003d - 1: # Pokud se "šipka vlevo" otáčejí motor 2 vlevo, pokud klíč \u003d\u003d Curses.Key_Left: # Zobrazení řetězce "M2<---" в позиции 6, 10 stdscr.addstr(6, 10, "M2 <---") rotate(2, "l") # Если клавиша "стрелка вправо" то вращаем движок 2 вправо elif key == curses.KEY_RIGHT: stdscr.addstr(6, 10, "M2 --->") Otáčejte (2," R ") # Pokud je tlačítko" A "otočit motor 1 do levého klíče ELIF \u003d\u003d ORD (" A "): stdscr.addstr (6, 10," m1<---") rotate(1, "l") # Если клавиша "d" то вращаем движок 1 вправо elif key == ord("d"): stdscr.addstr(6, 10, "M1 --->") Otáčejte (1," R ") # Pokud je klíč" S ", zastavte všechny klíče ELIF Engine \u003d\u003d ORD (" S "): stdscr.addstr (6, 10," STOP 12 ") STOP_ALL () # Pokud klíč "s" opustíme od klíčového klíče ELIF \u003d\u003d ORD ("Q"): # Obnovení předchozích nastavení terminálu SDDSCR.KEYPAD (0) Curses.ECHO () Curses.endwin () # čištění a výstup os.system ("clear") sys.exit () # aktualizovat text na obrazovce a vytvořit malou latenci stdscrefresh () time.sleep (0.01)
Spuštěním skriptu, můžete potřebovat podkopat šipku klávesnice "vlevo" a "vpravo", stejně jako klíče s písmeny "A" a "D" - motory se musí střídat střídavě a v různých směrech a program zobrazí svůj aktuální provozní režim.
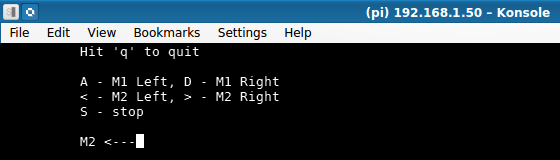
Obr. 8. Program na Pythonu pro ovládání motorů pomocí ovladače L298 (terminál Konsole, KDE).
Stručná video ukázka provozu tohoto experimentu je uvedeno níže:
Co je krokový motor, typy hlav
Krokový motor (Pro ty, kteří nevědí) - jedná se o elektromotor, ve kterém nejsou kartáče a vinutí na statoru (kotva), jsou přítomny na rotoru a jsou umístěny takovým způsobem, který spojuje každý z nich k výkonu Zdroj provádíme fixaci rotoru (vezmeme jeden krok). Pokud střídavě napájíte napětí ke každému z vinutí s nezbytnou polaritou, je možné, aby se motor otáčel (aby se sekvenční kroky) v požadovaném směru.
Stepper Motors jsou spolehlivé, nosit stojany a umožňují kontrolovat rotaci do určitého úhlu, aplikovat v automatizaci procesů, ve výrobě, v elektronické výpočetní techniky (jednotky CD-DVD, tiskárny, kopírky) a podobně.
Tyto motory jsou následující typy:
- Bipolární - 2 vinutí, jeden po každé fázi, lze použít k řízení obvodu na 2 H-most nebo jeden polosystýnu s bipolární mocí;
- Jednopolární - 2 vinutí, z nichž každý s kohoutkem od středu je vhodné přepnout fáze změnou poloviny každé z vinutí, zjednodušuje diagram řidiče (4 klíč), stejně jako použití jako capolar bez použití vinutí kohoutky;
- S výraznými vinutí - Univerzální, spojující vinutí lze použít jako kapaclasový nebo unipolární motor.

Obr. 9. Typy krokových motorů: bipolární, unipolární, se čtyřmi vinutí.
Je možné určit typ použitého motoru zpravidla podle počtu závěrů v jeho případě, a nebude to bolet zavolat všechny závěry s testerem, aby určily, zda existují poruchy mezi vinutími.
L298 + krokový motor + malina pi
Nyní pojďme připojit odstupňovací motor, v mém případě je aplikován bipolární výkonný krokový motor extrahovaný ze staré tiskárny matrice.
Pro připojení jednoho bipolárního motoru budete potřebovat dva výstupy ovladače na L298 (dva H-mosty). Pro tento experiment musí být modul L298 připojen k malinové pI, stejně jako v s.
Dříve můžete experimentovat bez malinky - sloužit střídavě na vstupech napětí modulu L298 5V a zjistit, jak bude hřídel motoru provádět kroky.
V podstatě, s Malinka, budeme střídavě a s určitým zpožděním dodávat pulsy na vinutí motoru, než aby se jeho hřídel otáčel do směru, který jsme potřebovali a na správné rychlosti.

Obr. 10. Připojení bipolárního krokového motoru do modulu L298 pro řízení přes Malinový PI.
Pokud je vše již připojeno, obrátíme se na experimenty s jednoduchým testovacím programem na Pythonu, který vám pomůže pochopit, jak pracovat se krokovým motorem pomocí L298 + Raspberry PI.
Vytvořte soubor pro skript a otevřete jej upravit:
Nano /Home/pi/l298_stepper_motor_test.py.
Vložte následující kód skriptu do editoru na Pythonu :
#! / Usr / bin / env python # - * - kódování: utf-8 - * - import času importu rpi.gpio jako gpio # připravit piny gpio. GPIO.CLEANUP () GPIO.SETMODE (GPIO.BCM) GPIO.SETUP (4, GPIO.OUT) GPIO.Output (4, GPIO.LOW) GPIO.SETUP (17, GPIO.OUT) GPIO.Output (17, GPIO) .Low) GPIO.SETUP (27, GPIO.OUT) GPIO.Output (27, GPIO.LOW) GPIO.SETUP (22, GPIO.OUT) GPIO.Output (22, GPIO.LOW) # Zpoždění času mezi kroky, sec . step_timeout \u003d 0,0105 # trvání pulsu, sec. Impulse_Timeout \u003d 0.008 # Krok 1. GPIO.Output (4, GPIO.HIGH) TIME.SLEEP (Impulse_Timeout) GPIO.Output (4, GPIO.LOW) Time.Sleep (Step_Timeout) # Krok 2. GPIO.Output (17, GPIO) .Vight) time.sleep (impulse_timeout) gpio.output (17, gpio.low) time.sleep (step_timeout) # krok 3. GPIO.output (27, gpio.hight) time.sleep (impulse_timeout) gpio.output (27) , GPIO.LOW) TIME.SLEEP (STEP_TIMEOUT) # Krok 4. GPIO.Output (22, GPIO.HIGH) TIME.SLEEP (Impulse_Timeout) GPIO.Output (22, GPIO.LOW) TIME.SLEEP (Step_timeout) # jsme Čekání na 10 sekund. TIME.SLEEP (10) # 20 krát 4 kroky v cyklu. Pro I v dosahu (0,20): GPIO.Output (4, GPIO.HIGH) TIME.SLEEP (Impulse_Timeout) GPIO.OUPPUT (4, GPIO.LOW) TIME.SLEEP (STEP_TIMEOUT) GPIO.Output (17, GPIO. Vysoký) Time.sleep (impulse_timeout) gpio.output (17, gpio.low) time.sleep (Step_timeout) GPIO.Output (27, GPIO.HIGH) TIME.SLEEP (Impulse_Timeout) GPIO.Output (27, GPIO.LOW) Čas. Spánek (step_timeout) gpio.output (22, gpio.high) time.sleep (impulse_timeout) gpio.output (22, gpio.low) time.sleep (step_timeout)
Provedeme soubor se spustitelnými spustitelnými skripty a spusťte jej na realizaci:
CHMOD + X /Home/pi/l298_stepper_motor_test.py /Home/pi/l298_stepper_motor_test.py
knimu spuštění skriptu, odstupňovací motor musí provádět 4 kroky (otáčení v jednom směru), pak čeká na 10 sekund, znovu začne otočení a bude to 20 * 4 kroky.
Nyní zvažte příklad interaktivního programu, který umožňuje ovládat směr a rychlost otáčení (sekvenční kroky) krokového motoru pomocí klávesnice.
#! / Usr / bin / env python # - * - kódování: UTF-8 - * - Importovat OS Importovat Sys Import Curses Import Time Import RPI.GPIO jako GPIO # Funkce pro přípravu pinů GPIO DEF SETUP (* porty): GPIO. CLEANUP () # piny pojmenování režimu podle názvu, a ne podle čísla na desce GPIO.SETMODE (GPIO.BCM) pro port v portech: Instalace PINU na výstup + nízká úroveň "0" GPIO.SETUP (port, GPIO.OUT) GPIO.Output (port, GPIO.LOW) # Funkce pro napájení pulsu na pin s určitým zpožděním (1 krok) DeplSE (port \u003d 0): GPIO.Output (port, GPIO.HIGH) # Nastavte hodnotu časového limitu Být Thieugh pro jeden krok čas.sleep (0.008) GPIO.Output (port, GPIO.LOW) TIME.SLEEP (časový limit) # Provádíme instalaci nastavení PIN GPIO (4, 17, 27, 22) # zpoždění Kroky (výchozí) časový limit \u003d 0.0105 # Směr otáčení (výchozí) směr \u003d "R" # inicializace obrazovky (zaklínek modul) stdscr \u003d curses.initscr () # # reaguje na stisknutí klávesy bez potvrzení pomocí Enter Curses.Break () # Povolit použití zapnutých StDDScr.KeyPad klávesnice (1) # Nezakrývejte časový program při dotazování události SDDSCr.Nodelay (1) # zobrazení na obrazovce ve výchozím nastavení STDSCr.Addstr (0, 10 "" Hit "Q" k ukončení ") StDSCR. Addstr (2, 10, "---\u003e") stdscr.Addstr (3, 10, "časový limit:" + STR (časový limit)) stdscrefresh () # hlavní cyklus, zatímco true: # sada pulzů pro otočení hřídele Motor doprava, pokud směr \u003d\u003d "R": impuls (4) impuls (4) impuls (17) impulsní (27) impulsní (22) # # sada pulzů pro otočení hřídele motoru na levý směr ELIF \u003d\u003d "l": impuls ("l": impuls ("l". 22) impuls (27) impuls (17) impuls (4) # # Přečtěte si klíč stisknutí klávesy a zkontrolovat klíč \u003d stdscr.getch (), pokud klíč! \u003d -1: # "vlevo" změní směr otáčení: vlevo Pokud klíč \u003d\u003d curses.key_left: # zobrazí text "<---" в позиции экрана 2, 10 stdscr.addstr(2, 10, "<---") # Изменим значение переменной с направлением вращения direction = "l" # Клавиша "вправо" меняет направление вращения: ВПРАВО elif key == curses.KEY_RIGHT: stdscr.addstr(2, 10, "--->") Směr \u003d" R "#" nahoru "Otevření otáčení klávesy ELIF \u003d\u003d Curses.Key_Up: # Zmenšit zpoždění mezi kroky časového limitu \u003d časový limit - 0.0005 #" Dolů "Zpomaluje otáčení klíče ELIF \u003d \u003d Curses.key_down: # Zvýšení zpoždění mezi časovým časovým limitem \u003d Časový limit + 0.0005 # Q Key Provádí výstup z klávesy ELIF \u003d\u003d ORD ("Q"): StDDSCr.KeYpad (0) Curses.ECHO () CursceS.endwin (0) ) OS.SYSTEM ("CLEAR") SYS.EXIT () # vzhled tak, aby doba zpoždění neprošla ohraničením 0, pokud časový limit<= 0: timeout = 0.0005 # Обновляем текст на экране stdscr.addstr(3, 10, "Timeout: " + str(timeout)) stdscr.refresh() time.sleep(0.01)
Nyní máme levé šipky vlevo a vpravo a podíváme se na to, jak se směr otáčení hřídele motoru změní, a když jsou tlačítka stiskly nahoru a dolů rychlost se zvýší a snižuje se odpovídajícím způsobem.
Pokud se motor neotáčí, je možné, že je možné změnit polaritu připojení jednoho z vinutí modulu na L298.

Obr. 11. Bipolární krokový program pro správu motoru, L298, malina pi.
Video demonstrace krokové práce motoru:
Závěr
Doufám, že máte odpověď na otázku "Co je to H-most a jak to funguje", z experimentů by mělo být jasné, jak aplikovat řidiče na čipu L298 a připojit různé motory.
Je důležité poznamenat, že na internetu najdete hotové knihovny a skripty na Pythonu pro snadné ovládání motorů pomocí H-mostu na L298 pomocí Raspberry PI.
- Ačkoli bipolární krokové motory jsou relativní k silnici, pro jejich fyzikální rozměry poskytují vysoký točivý moment. Pro dva vinutí motoru se však vyžaduje osm regulačních tranzistorů, připojených ve čtyřech H-mostech. Každý tranzistor musí vydržet přetížení a krátké obvody a rychle obnovit výkon. Řidič, respektive, vyžaduje komplexní schémata ochrany s velkým počtem pasivních komponent.

Obrázek 1.
Obrázek 1. Jeden čip v povrchové instalaci skříně a několika pasivních komponent může řídit bipolární krokový motor.
Bipolární stepční řízení motoru
Stepper řídit řidič s vlastními rukama - Obrázek 1 ukazuje alternativní schéma ovladače motoru založený na Zesilovače zvuku Maxim. Max9715 mikroobvod v miniaturním případě pro povrchovou montáž může být podáván napájení 2,8 W v typickém zatížení 4 nebo 8 ohmů. Každá ze dvou sadů je tvořena H-mosty z výkonného MOSFET, řídicí dvojice předkurstva +, potrubí a potah +, ALt-, které jsou napojeny na navíjení A a v kromečném motoru. Každý pár generuje diferenciální šířku modulovaný pulzní signál s jmenovitou spínací frekvencí 1,22 MHz. Malá úroveň interference, vytvořená schématem, eliminuje potřebu výstupních filtrů.
Kondenzátory křižovatky
Kondenzátory C1, C3, C4 a C6 slouží jako výměna pro napájecí vstupy a posunutí a C5 a C7 provádět úložné funkce pro výkonné výstupní zesilovače třídy D. kondenzátory C8 a C9 omezují šířku pásma zesilovače na 16 Hz a ferit Korálky L2 a L3 oslabují elektrickou interferenci zkontrolovanou na dlouhých kabelech. P-ve tvaru filtru C1, C2, L1 potlačuje rušení na vstupu IC1 čipu. Vstupní signály Step_A a krok_s, ovládání, vpravo a levých kanálů motoru mohou být tvořeny jakýmkoliv vhodným regulátorem. Vnitřní řetězy chrání zesilovač z krátkých obvodů a přehřátí v případě poruchy krokového motoru nebo nesprávného spojení svých závěrů.

stůl 1
Ilustrace sekvence impulsů
Tabulka 1 znázorňuje posloupnost pulzů step_a a step_b řídit otáčení typického krokového motoru v jednom směru průběžně přiváděním kombinací signálu od 0 do 4. Krok 4 Vrací hřídel motoru do původní polohy, dokončení obratu 360 °. Chcete-li změnit směr otáčení motoru, začněte vytvářet dočasný pulzní diagram ze spodní části stolu a pohybujte se nahoru. Jídlo s nízkým logickým hladinovým napětím do vstupu SHDN čipu (výstup 8), můžete zakázat oba kanály zesilovače. Formy signálů na vstupech a výstupech obvodu jsou znázorněny na obrázku 2.







