Когато използвате стари HDD дискове в приложни цели, понякога има проблем с факта, че двигателят на шпиндела спира след известно време след пускането. Те имат такъв "чип" - ако няма сигнали от главата на главата към микро-контролера, тогава той забранява микросисния за завъртане на двигателя. Например, множество модели на задвижването нека се опитаме да разберем как да го поправим.
Всичко започна с факта, че те донесоха няколко стари твърди диска ( фиг. 1) И те казаха, че тук работниците са пред "убитите", които искате - изберете, не искате - правете това, което искате. Но ако го разберете как да ги използвате като малка емия за редактиране на инструменти, кажете ми. Е, тук - казвам ...
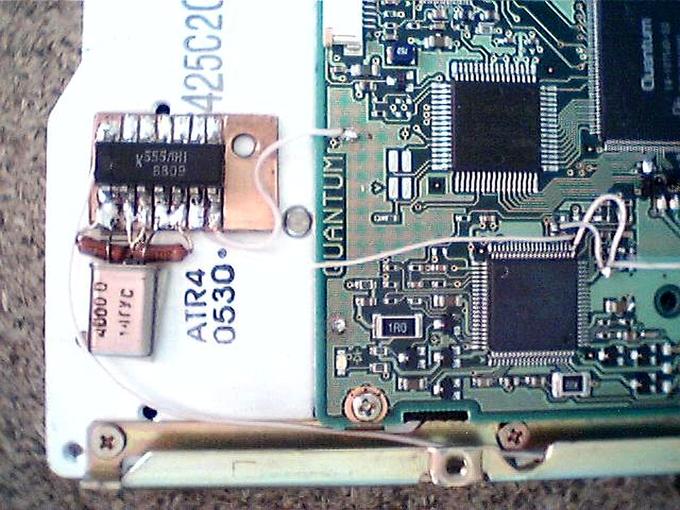
Първи HDD - Квантово семейство "FireBall TM" с чип за задвижване TDA5147AK ( фиг. 2.). Нека видим какво е той.

Горният капак е закрепен с 4 винта в ъглите и един винт и гайката, под върха под стикерите. След отстраняване на капака, твърд диск е видим, четейки глави и система за управление на позицията на магнита ( фиг. 3.). Ние изключваме кабела, ние отвиждаме магнитната система (тук имате нужда от специално заточен хексан ключ "звезда"). Ако желаете, дискът може да бъде премахнат, ако развиете трите винта на шпиндела на двигателя (вие също се нуждаете от шестоъгълник).

Сега поставяме капака на място, така че да можете да завъртите HDD за експерименти с електроника и да се подадете в захранващия конектор на напрежението +5 V и + 12V. Двигателят се ускорява, работи около 30 секунди и след това спира (има зелен светодиод на печатната платка - той изгаря, когато двигателят се завърта и мига, когато спре).
Мрежата се намира лесно на чип TDA5147K, но не успя да се справи с сигнала за разрешаване / забрана. Когато "издърпането" на POR сигналите към захранващия автобус не е било възможно да се постигне необходимата реакция, но когато се разглеждат сигналите с осцилоскоп, той се оказа, че когато сондата 7-мо оттегляне на чипа TDA5147AK е нулиране и рестартиране на двигател. По този начин, чрез събиране на най-простия кратък импулсен генератор ( фиг, По-ниска снимка) с период от няколко секунди (или десетки секунди), можете да принудите двигателя да се върти повече или по-малко постоянно. Възникващите паузи в захранването продължават около 0.5 секунди и това не е критично, ако двигателят се използва с малък товар на вала, но в други случаи може да е неприемливо. Следователно, методът е макар и ефективен, но не съвсем правилно. И "правилно", за да го стартирате и да се провалим.

Следващия HDD - "Квантово" семейства "Trailblazer" (фиг.5.).

При доставката на захранващите напрежения устройството не предоставя никакви признаци на живот и микроцирците от 14-107540-03 започва на борда на електрониката. В средата на корпуса на чипа, изпъкналата е забележима ( фиг.6.) Какво говори за нея изричната недействителност. Срамно е, но не е страшно.

Разглеждаме микроцирността на двигателя за управление на двигателя ( фиг.7.) - HA13555. Той не се нагрява и няма видими щети върху нея. Изпитването на тестера на "щрапването" елементи не знаеше нищо специално - остава само за да се справи с схемата "включване".

Търсачките за данни не го намират, но има описание на HA13561F. Той е направен в същия случай, съвпадащ на краката на гайките и на "изходните" заключения с HA13555 (последният до моторните проводници на двигателя са пометени диоди - защита срещу борба-EMF). Нека се опитаме да определим необходимите заключения за управление. От листа с данни на HA13561F ( фиг.8.) Следва, че честотата на часовника от 5 MHz с нивото на TTL логиката трябва да се приложи към изхода 42 (часовник) и че сигналът, който позволява стартирането на двигателя, е високо на изхода 44 (Spnenab).

Тъй като чипът 14-107540-03 не работи, тогава отрязахме силата +5 от нея и от всички останали чипове, с изключение на HA13555 ( фиг.9.). Тестерът проверява коректността на "съкращенията" върху отсъствието на съединения.
На долната снимка фигура 9. Червени точки, показващи подфилевите полето на стреса +5 за HA13555 и резистор "Studenders до плюс" от 44 изхода. Ако изходният резистор 45 е отстранен от родното място (това е R105 фигура 8.) и го поставете вертикално с някаква склонност към чипа, след това един допълнителен резистор за окачен до "плюс" на изхода 44 може да бъде споен за отваряне на прехода и до безшумен изход на първия резистор ( фиг.10.) И след това мощността е +5 V може да бъде предоставена на тяхната връзка.

На гърба на дъската, песните трябва да бъдат отрязани, както е показано фигура 11.. Това са "бивши" сигнали, идващи от изгорения чип 14-107540-03 и старата "боклук" на резистор R105.

Можете да организирате подаването на "нови" сигнали за часовник за показване на 42 (часовник), като се използва допълнителен външен генератор, събран при всякакви подходящи микроцирци. В този случай е използван K555LN1 и се показва получената схема фигура 12..

След "заваряване" с MGTF тел на захранващото напрежение +5 V директно от конектора към изхода 36 (VSS) и други необходими връзки ( фиг.13.), Устройството започва и работи без прекъсване. Естествено, ако чип 14-107540-03 е правилно, цялото изтънченост ще бъде само в "Treet" на 44-то теглене на автобуса +5 V.
На този "винт" е тестван за други честоти на часовника. Сигналът се подава от външен генератор на правоъгълни импулси и минималната честота, с която устройството работи непрекъснато 2.4 MHz. При по-ниски честоти циклично има овърклок и спиране. Максималната честота е около 7.6 MHz, с по-нататъшно увеличение на увеличението му, броят на оборотите остава същият.
Броят на оборотите също зависи от нивото на напрежението на изхода 41 (CNTSEL). В таблицата на данни на чипа HA13561F има таблица и съответства на стойностите, получени от HA13555. В резултат на всички манипулации е възможно да се получи минимална скорост на въртене на двигателя около 1800 rpm, максимум - 6864 rpm. Контролът е извършен с помощта на програма, оптрони с усилвател и част от лента, показана на диска, така че да се окаже прозорец на оптиката при завъртане на диска (в прозореца на анализатора на спектъра, след това се определя скоростта на повторение на импулса и след това се умножава с 60).
Трето шофиране - "Samsung wn310820a".
При захранване на микросирцита, водачът - HA13561 започва да се затопля много, двигателят не се върти. В случай на чипа е забележима изпъкналост ( фиг.14.), както в предишния случай. Тя няма да работи никакви експерименти, но можете да се опитате да спасите двигателя от дъската с микроцирците HA13555. Дългите тънки проводници бяха преместени до цикъла на двигателя и на изходните контакти на конектора на борда на електрониката - всичко започна и работи без проблеми. Ако HA13561 е цяло, усъвършенстването на старта би било същото като за квантовата трапезар (44-то теглене на автобус +5 V).

Четвърто шофиране - Квантово семейство "FireBall SE" С чип за задвижване AN8426FBP ( фиг.15.).

Ако изключите кабела на главата и нанесете захранването на HDD, двигателят набира скорост и естествено, след известно време спира. Datashitte на чип AN8426FBP е онлайн и можете да го разберете, че изходът 44 (SIPWM) е отговорен за стартирането. фиг.16.). И ако отидете сега, за да изрежете пистата от чипа 14-108417-02 и "затегнете" изхода 44 през резистор от 4.7 com до +5 b гумата, двигателят няма да спре.

И накрая, връщайки се малко назад, формите на сигнали на изходите W и V чип HA13555 спрямо общия проводник бяха отстранени ( фиг. 17).

Най-простото прилагане на стария HDD е малко умение за редактиране на валяк, ножове, отвертка ( фиг.18.). За да направите това, достатъчно е да се придържате към магнитния диск шкурка. Ако "винтът" е с няколко "палачинки", тогава можете да направите взаимозаменяеми дискове с различна зърненост. И тук е добре да можете да превключвате скоростта на въртене на двигателя на шпиндела, както и с голям брой обороти, много лесно е да се открадне повърхността на залепване.

Новини, разбира се, не единственото заявление за стария HDD. Мрежата лесно съдържа дизайна на прахосмукачки и дори апаратурата за готвене на сладка вълна ...
В допълнение към текста са споменати данни за данни и печатни платки на външни импулсни генератори в програмния формат на 5-та версия (отпечатък, чипс се монтират като SMD, т.е. без пробивни отвори).
Андрей Голцов, R9O-11, Iskitim, април 2018 година.
Списък на радио елементи
| Обозначаване | Тип | Номинален | номер | Забележка | Резултат | Моят бележник | |
|---|---|---|---|---|---|---|---|
| Виж фигура 4. | |||||||
| DD1. | Чип | K561LN2. | 1 | В преносим компютър | |||
| R1, R2. | Резистор | 470 COM. | 2 | sMD 0805. | В преносим компютър | ||
| R4. | Резистор | 10 COM. | 1 | sMD 0805. | |||
Имам дълъг прах, имам такъв малък двигател, който преминах от някакъв твърд диск. Дискът, между другото, също е запазен от него! Ако се съберете - го покрийте на следващия етап. Междувременно реших просто да се опитам да го вземам. Този двигател е интересен в това на теория (както разбрах - човек, който не знае нищо за двигателите), той е клапан. И как да кажем Уикипедия: "Двигателите на клапаните са предназначени да комбинират най-доброто качество на променливотоковите двигатели и DC двигателите." И за сметка на отсъствието на плъзгащи електрически контакти (тъй като четката се заменя там върху безконтактния полупроводник), такива двигатели имат висока надеждност и висок експлоатационен живот. След това няма да изброя всички други предимства на тези двигатели и по този начин да ретам на Уикипедия, но просто ще кажа, че използването на такива неща е доста широко, включително в роботиката и затова исках да науча повече за принципите на тяхната работа.
Принципа на работа на двигателя HDD.
В двигателя, тримонта, свързани с принципа "звезда". Общата точка на намотките се показва на плюс. + 5V за работа е подходящо перфектно. Контрол се контролира Shim сигнален двигател, който трябва да се подава към навиването му с фазова смяна 120 °. Въпреки това е невъзможно да се предостави желаната честота на двигателя веднага, тя трябва да бъде претоварена. Най-простият начин за свързване на тримост през транзистори, захранване на PWM сигнала към основата от микроконтролера.Незабавно направете резервация на транзисторите: по-добре е да се вземат полетата, защото текущата през тях изглежда е прилична, а биполярът е много горещ. Първо взе 2N2222A. Нагряти в секунди, временно решават проблема, като инсталират редица охладители, но след това решиха, че нещо е необходимо, което е повече от ☺ в резултат на това, ние поставяме нашата CT817. Трети не се оказа, вместо това имам CT815. В тази схема те могат да бъдат заменени, но KT815 е предназначен за постоянен ток на колектора от 1,5 ампера и KT817 - 3A. Отбелязвам, че 2N2222A обикновено е до 0.8а. Буквата KT81 ... също не играе роли, тъй като имаме само 5 волта. На теория честотата на промяна на сигнала не е по-бърза от 1 милисекунда, тя е много по-по-бавна, така че високата честота на транзисторите да не играе и ролята. Като цяло подозирам, че в тази схема е възможно да се експериментират в почти всеки N-P транзистори от типа, с ток на колектора най-малко 1 ампер.
Прилагам схемата, резисторите също са избрани експериментално, 1 килом - достатъчно добре. Сложете още 4.7k - това е много, двигател Glah.
В изхода на двигателя 4. В началото разберете кой е общ. За това мултиметърът измерва съпротивата между всички заключения. Съпротивлението между краищата на намотките е два пъти повече, отколкото между края на същото намотка и общата средна точка. Условно 4 ома срещу 2. какъв вид намотка, където да се свържете - няма значение, те все още си отиват един на друг.
Текст на програмата:
// стартиране на твърд дискvoid setup ()
#Define p 9100 // първоначално закъснение за овърклок на двигателя
#Define x 9 // pina номер за навиване x
#Define y 10 // номер PINA до навиване y
#Define z 11 // номер pina до намотка z
неподписан int p; // променливо забавяне за овърклок
дълъг период от време; // Таймер
byte i \u003d 0; // Цикъл на контрол на фазите на двигателя Меклек
{
p \u003d p; // Ние присвояваме първоначалната стойност на закъснението на овърклок//Serial.bgin(9600); // Open Com порт за DeBag
pinmode (x, изход); // Инсталирани щифтове, работещи с двигател за данни за данни
pinmode (Y, изход);
pinmode (z, изход);
цифрови фрази (x, low); // инсталира първоначалната фаза на двигателя, може да се стартира с някоя от 6-те фази
цифрови фрази (y, high);
цифрови фрази (z, low);
Time_pass \u003d micros (); // Zering Timer.void loop ()
{ако аз< 7) && (micros () - time_pass >\u003d P)) // Ако измервателят има число от 0 до 6, и времето за изчакване на фазата е преминало
{
Time_pass \u003d micros (); // Нулирайте таймера
if (i \u003d\u003d 0) (цифрови фрази (z, high);) // set 0 или 1 в зависимост от фазовия номер на желания щифт
iF (i \u003d\u003d 2) (цифрови фрази (y, low);)
iF (i \u003d\u003d 3) (цифрови фрази (x, high);)
iF (i \u003d\u003d 4) (цифрови фрази (z, low);)
iF (i \u003d\u003d 5) (цифрови фрази (y, high);)
iF (i \u003d\u003d 6) (цифрови фрази (x, low);)I ++; // плюс фазовия метър
}
ако (i\u003e \u003d 7) // ако броячът е претъпкан
{
I \u003d 0; // Нулиране на метъра
ако (p\u003e 1350) (p \u003d p - 50;) // ако двигателят все още не е въвел максималната скорост - намаляваме времето на промяна на фазата
//Serial.println (P); Дебат за времето за изчакване
}
Какво в резултат на това?
В резултат на това имаме двигател, който се ускорява след няколко секунди. Понякога овърклок е небалансиран, а двигателят спира, но всичко работи по-често. Как да стабилизирате - все още не знам. Ако спрете двигателя с ръката си, тя няма да започне отново - имате нужда от рестартиране на програмата. Досега това е максималният, който успя да изтръгне от него. При понижаване на P под 1350 двигателят излита от овърклок. 9100 В началото тя също е избрана експериментално, можете да се опитате да промените, вижте какво ще се случи. Вероятно, за друг двигател, числата ще бъдат различни - трябваше да взема собствена. С товара (оригиналния диск) двигателят престава да стартира, така че инсталацията на нещо ще изисква калибриране на фърмуера към него. Тя се върти сравнително бързо, така че препоръчвам, когато започнете да носите очила, особено ако нещо виси в този момент в този момент. Надявам се да продължа експериментите с него. Докато всичко е, късмет!
. Темата е безусловна интересна особено за начинаещи на радио "мъчители", но по мое мнение не е напълно разкрито. Нелогично завършване, а именно каква схема използва много уважавани, Twisterза решението си, предложено от Лий (Моят колега за журналистическата работа)С.anyaav на m / s tda5145, Mk или някой друг. Тази статия искам да допълвам някои от пропуските във форума и по мое мнение, за доста достоен за най-малко съвременни стандарти и стар чипLb.11880. И така да започнем и да започнем с обща информация, какъв е двигателят от HDD, CD-ROM, DVD-ROMДвигател за въртене на твърдия диск шпиндел (или CD / DVD-ROM) е синхронен трифазен DC двигател.
Можете да подканите такъв двигател, като го свържете с три каскади, които се контролират от трифазен генератор, честотата на която е много малка, когато е включена и след това гладко се повишава до номиналното. Това не е най-доброто решение на проблема, такава схема няма обратна връзка и следователно честотата на генератора ще се повиши с надеждата, че двигателят има време да спечели инерция, дори ако всъщност валът му все още е. Създаването на схема за обратна връзка ще изисква използването на сензорите на позицията на ротора и няколко EMS изгражда, без да се броят изходните транзистори. CD / DVD-ROM вече съдържа сензорите за зала, по сигналите, на които можете да определите позицията на ротора на двигателя, но понякога няма значение точно точното положение и не искате да измивате "допълнителни кабели".
За щастие, индустрията произвежда готови еднократни контролни драйвери, които освен това не се нуждаят от сензори на позицията на ротора, намотките на двигателя се задействат в ролята на такива сензори.Контролните микроцинства на трифазните DC двигатели, които не изискват допълнителни сензори (сензорите са самите задвижване на двигателя):TDA.5140; TDA.5141; TDA.5142; TDA.5144; TDA.5145 и разбира се Lb.11880. (Има някои други, но друг път.)
Схематична диаграма на свързването на двигателя към микроцирците LB11880.
Първоначално този микроцирц е предназначен да контролира видеорекордерите на двигателя BVG, в клавишите каскади, има биполярни транзистори, а не MOSFET.В структурите си използвах този конкретен чип, тя първо се оказа в най-близкия магазин, второ, цената му беше по-ниска (макар и не много), отколкото в други чипове от над списъка.
Всъщност електрическата верига на двигателя:

Ако двигателят ви изведнъж няма 3 A 4 изхода, то трябва да бъде свързан съгласно схемата:

И друга по-визуална схема, пригодена за използване в колата.
Малко повече информация за LB11880 и не само
Двигателят, свързан чрез определените схеми, ще се ускори, докато или ограничението на честотата на генериране на чипа VCO, която се определя от съотношенията на кондензатора, свързани с изхода 27 (как капацитетът му е по-малък, толкова по-висока е честотата на честотата или двигателя няма да бъдат унищожени механично.Тя не трябва да бъде твърде намалена чрез капацитета на кондензатора, свързан с изхода 27, тъй като може да затруднява стартирането на двигателя.
Как да регулирате скоростта на въртене?
Регулиране на скоростта на въртене се извършва чрез промяна на напрежението при изхода на 2 чипа, съответно: VPIT - максималната скорост; 0 - Двигателят е спрян.
Въпреки това трябва да се отбележи, че не е възможно да се регулира честотата просто чрез прилагане на променливия резистор, тъй като корекцията не е линейна и се появява в по-малки граници, отколкото VPIT - 0, в този най-добър вариант ще бъде свързан с това кондензатор, с който чрез резистор, например от микроконтролер. PWM сигнал добре или PWM регулатор на световно известния таймерНе555 (такива схеми в интернет са напълно)
За да се определи текущата скорост, трябва да се използва изходът от 8 чипове, на който импулсите присъстват при въртене на вала на двигателя, 3 импулса на 1 оборот на вала.
Как да зададете максималния ток в намотките?
Известно е, че трифазните DC двигатели консумират значителен ток извън техните режими на работа (когато се захранват от свързани честотни импулси).За да зададете максималния ток в тази схема, се сервира резистор R1.Веднага след като напрежението спада на R1 и следователно, изходът 20 ще стане повече от 0.95 волта, след това изходният драйвер на чипа прекъсва пулса.Изборът на стойност на R1, помислете, че за този чип максималният ток не е повече от 1.2 ампер, номиналното 0.4 усилвател.
Параметри Чип LB11880.
Захранващо напрежение на етапа на изхода (заключение 21): 8 ... 13 волта (максимум 14.5);
Ядро на захранване (изход 3): 4 ... 6 волта (максимум 7);
Максимална мощност на разсейване на микроцирци: 2.8 вата;
Работен температурен диапазон: -20 ... +75 градуса.

Този диск (въпреки че когато нямаше медни болтове), ще изглежда малък и твърд двигател от стар твърд диск до 40GB, предназначен за 7200 оборота / мин (rpm) успя да ускори около 15 000 ... 17000 оборота / min, ако не ограничите скоростта му. Така че зоната на използване на двигатели от тунинг твърди дискове, мисля, че много обширна. Заточването / пробиването / българското със сигурност не е направено, дори не мислете, но без специален товар, двигателите са способни много.
Е.
isil архив за самостоятелно сглобяване
Късмет !!
Можете да популяризирате такъв двигател чрез свързване към три полуразмер каскади, които се управляват от трифазен генератор, чиято честота е много малка, когато е включена и след това гладко се повишава до номиналното. Това не е най-доброто решение на проблема, такава схема няма обратна връзка и следователно честотата на генератора ще се повиши с надеждата, че двигателят има време да спечели инерция, дори ако всъщност валът му все още е. Създаването на схема за обратна връзка ще изисква използването на сензорите на позицията на ротора и няколко EMS изгражда, без да се броят изходните транзистори. CD / DVD-ROM вече съдържа сензорите за зала, по сигналите, на които можете да определите позицията на ротора на двигателя, но понякога няма значение точно точното положение и не искате да измивате "допълнителни кабели".
За щастие, индустрията произвежда готови еднократни контролни драйвери, които освен това не се нуждаят от сензори на позицията на ротора, намотките на двигателя се задействат в ролята на такива сензори.
Контролните микроцинства на трифазните DC двигатели, които не изискват допълнителни сензори (сензорите са самите задвижване на двигателя):
LB11880; TDA5140; TDA5141; TDA5142; TDA5144; TDA5145..
Има някои други, но по някаква причина те не се продават, където търсех, но не обичам да чакам от 2 до 30 седмици ред.
Концепция за свързване на двигателя към Microcircuit на LB11880
Първоначално този микроцирц е предназначен да контролира двигателя BVG VCR, така че да е стар, в ключови каскади, той има биполярни транзистори, а не MOSFET.В своите дизайни използвах този конкретен чип, тя първо се оказа в най-близкия магазин, второ, цената му беше по-ниска от тази на други чипове от списъка по-горе.
Всъщност електрическата верига на двигателя:

Ако вашият двигател няма 3 A 4 изхода, след това свържете, следва Схемата:

Малко повече информация за LB11880 и не само
Двигателят, свързан чрез определените схеми, ще се ускори, докато или ограничението на честотата на генериране на чипа VCO, която се определя от съотношенията на кондензатора, свързани с изхода 27 (как капацитетът му е по-малък, толкова по-висока е честотата на честотата или двигателя няма да бъдат унищожени механично.Тя не трябва да бъде твърде намалена чрез капацитета на кондензатора, свързан с изхода 27, тъй като може да затруднява стартирането на двигателя.
Как да регулирате скоростта на въртене?
Регулиране на скоростта на въртене се извършва чрез промяна на напрежението при изхода на 2 чипа, съответно: VPIT - максималната скорост; 0 - Двигателят е спрян.
Въпреки това трябва да се отбележи, че не е възможно да се регулира честотата просто чрез прилагане на променливия резистор, тъй като корекцията не е линейна и се появява в по-малки граници, отколкото VPIT - 0, в този най-добър вариант ще бъде свързан с това кондензатор, с който чрез резистор, например от микроконтролер. PWM сигнал.
За да се определи текущата скорост, трябва да се използва изходът от 8 чипове, на който импулсите присъстват при въртене на вала на двигателя, 3 импулса на 1 оборот на вала.
Как да зададете максималния ток в намотките?
Известно е, че трифазните DC двигатели консумират значителен ток извън техните режими на работа (когато се захранват от свързани честотни импулси).
За да зададете максималния ток в тази схема, се сервира резистор R1.
Веднага след като напрежението спада на R1 и следователно, изходът 20 ще стане повече от 0.95 волта, след това изходният драйвер на чипа прекъсва пулса.
Изборът на стойност на R1, помислете, че за този чип максималният ток не е повече от 1.2 ампер, номиналното 0.4 усилвател.
Параметри Чип LB11880.
Захранващо напрежение на етапа на изхода (заключение 21): 8 ... 13 волта (максимум 14.5);
Ядро на захранване (изход 3): 4 ... 6 волта (максимум 7);
Максимална мощност на разсейване на микроцирци: 2.8 вата;
Работен температурен диапазон: -20 ... +75 градуса.
Но всъщност, за което приложих двигателя от HDD заедно с посочения микроцир: 
Този диск (въпреки че когато нямаше медни болтове), ще изглежда малък и твърд двигател от стария Winchester Seagate Barracuda, при 40GB, предназначен за 7200 оборота / мин (rpm), успя да овърклок до 15000 ... 17000 оборота / мин, ако не ограничавам скоростта му. Така че зоната на използване на двигатели от тунинг твърди дискове, мисля, че много обширна. Със сигурност не е да не се прави тренировка / българин, но дори не мислете, но без специален товар, двигателите са способни да са много, например, ако въртят барабана с огледала, за механичното разширяване на лазерния лъч, и т.н.
При твърди дискове се използват трифазни неоснователни двигатели. Включването на двигателя е свързано от звездата, т.е. получаваме 3 изхода (3 фази). Някои двигатели имат 4 изхода, те допълнително са оттеглени средната точка на свързване на всички намотки.
За да се отпуснете на двигателя Neclector, е необходимо в правилния ред и в определени точки във времето, в зависимост от позицията на ротора, за да захранвате напрежението до намотките. За да определите момента на превключване към двигателя, се инсталират сензорите за зала, които играят ролята на обратна връзка.
При твърди дискове се използва друг метод за определяне на момента на превключване, два намотки са свързани към захранването на захранването, а третото напрежение се измерва, въз основа на това се извършва превключване. В 4-жичната версия са налични и двата изхода на свободното намотка, а в случай на двигател с 3 изхода се създава виртуална средна точка, като се използват резистори на свързаната звезда и свързани успоредно на намотките на двигателя. Тъй като превключването на намотките се извършва от положението на ротора, има синхронизация между честотата на въртене на ротора и магнитното поле, създадено от намотките на двигателя. Разстройството на синхронността може да доведе до спиране на ротора. 
Съществуват специализирани чипове като TDA5140, TDA5141, 42.43 и други предназначени за контролиране от необработени трифазни двигатели, но аз няма да ги разгледам тук.
В общия случай, диаграмата за превключване е 3 сигнала с правоъгълни импулси, изместени с фаза с 120 градуса. В най-проста версия можете да стартирате двигателя без обратна връзка, просто хранете 3 правоъгълни сигнала (меандър), компенсирайте помежду си до 120 градуса, които направих. В един период на меандър магнитното поле, създадено от намотките, прави един пълен завой около ос на двигателя. Ротационната скорост на ротора зависи от броя на магнитните полюси върху него. Ако броят на полюсите е два (една двойка полюса), роторът ще се върти със същата честота като магнитното поле. В моя случай, роторът на двигателя има 8 полюса (4 двойки полюси), т.е. роторът се върти 4 пъти по-бавно от магнитното поле. Най-твърдите дискове с честота на въртене от 7200 rpm, роторът трябва да има 8 полюса, но това е само моето предположение, тъй като не съм проверил купчина лебедки. 
Ако двигателят се прилага към двигателя с необходимата честота, в съответствие с желаната скорост на въртене на въртенето, тя няма да бъде повишена. Тук имате нужда от процедура за овърклок, т.е. първо задаваме импулси с ниска честота, след което постепенно се увеличавам до желаната честота. В допълнение, процесът на овърклок зависи от товара върху вала.
За да стартирате двигателя, аз приложим PIC16F628A микроконтролер. В частната част има трифазен мост върху биполярни транзистори, въпреки че е по-добре да се използват полеви транзистори за намаляване на разсейването на топлината. Правоъгълните импулси се образуват в подпрограмата за прекъсване. За да получите 3 сигнала, изместени по фаза, се извършват 6 прекъсвания, докато получаваме един период на меандър. В програмата Microcontroller внедрих плавно увеличение на честотата на сигнала до дадена стойност. Има само 8 режима с различна честота на сигнала: 40, 80, 120, 160, 200, 240, 280, 320 Hz. С 8 полюса на ротора, ние получаваме следните въртящи се скорости: 10, 20, 30, 40, 50, 60, 70, 80 rpm. 
Ускорението започва с 3 Hz за 0.5 секунди, това експериментално време, необходимо за първоначалната промоция на ротора в подходящата посока, тъй като се случва, роторът се превръща в малък ъгъл в обратна посока, само след това започва да се върти в подходящата посока. В същото време, моментът на инерцията се губи и ако веднага започнете увеличение на честотата, има разстояние, роторът в ротацията му просто няма да има време за магнитното поле. За да промените посоката на въртене, просто трябва да сменяте 2-те фази на двигателя.
След 0.5 секунди се появява плавно увеличение на честотата на сигнала до дадена стойност. Честотата се увеличава в съответствие с нелинейния закон, скоростта на растеж на честотата се увеличава по овърклок. Времето за ускорение на ротора към определените скорости: 3.8; 7.8; 11.9; шестнадесет; 20.2; 26.3; 37.5; 48.2 сек. Като цяло, без обратна връзка, двигателят е плътно ускорен, необходимото време за ускорение зависи от товара на вала, прекарах всички експерименти, без да отстраням магнитния диск ("прокле"), естествено без него, можете да ускорите.
Превключването на режимите се извършва с бутона SB1, индикацията на режима се извършва на HL1-HL3 светодиодите, информацията се показва в двоичен код, HL3 е нулев бит, HL2 е първият бит, HL1 - третата партида. Когато всички светодиоди са погасени, ние получаваме броя на нула, той съответства на първия режим (40 Hz, 10 Rd / s), ако например светодиодът HL1 е осветен, получаваме номер 4, който съответства на петата Режим (200 Hz, 50 Rd / s). Превключете SA1 стартирайте или спрете двигателя, състоянието на затворено контакт съответства на командата "Старт".
Избраният режим на скорост може да бъде записан в Microcontroller EEPROM, за това трябва да задържите бутона SB1 за 1 секунда, докато всички светодиоди ще светнат, като по този начин потвърждават записа. По подразбиране, при липса на запис в EEPROM, микроконтролерът влиза в първия режим. Така, като напишете в режим на памет и инсталиране на превключвателя SA1 към положение "Старт", можете да стартирате двигателя просто чрез подаване на захранването към устройството.
Въртящият момент на двигателя е малък, който не се изисква при работа на твърдия диск. С увеличаване на товара на вала, има разстояние и роторът спира. По принцип, ако трябва да прикрепите сензора за оборотите и в отсъствието на сигнал, изключете захранването и повторно популяризиране на двигателя.
Чрез добавяне на 3 транзистори до трифазен мост, можете да намалите броя на контролните линии на микроконтролера до 3, както е показано на диаграмата по-долу. 





")

