مقدمة موجزة نظرية وأنواع برامج التشغيل، نصائح حول اختيار برنامج التشغيل الأمثل لمحرك السائر.
أذا أردتشراء سائق الخطوة ، انقر فوق المخبر على اليمين
بعض المعلومات التي يمكن أن تساعدك حدد سائق محرك خطوة.
سائر المحرك - محرك مع مخطط تحكم معقد يتطلب خاص جهاز الكتروني - سائق القيادة السائر. يتلقى سائق الخطوة المحرك يتلقى إشارات منطقية الخطوة / Dir، والتي، كقاعدة عامة، بمستوى مرتفع ومنخفض من الجهد 5 V، ووفقا للإشارات الناتجة يغير الحالية في لفات المحرك، مما أجبر رمح تدوير في الاتجاه المناسب إلى الزاوية المحددة. \u003e يتم إنشاء إشارات خطوة / DIR بواسطة وحدة تحكم CNC أو جهاز كمبيوتر شخصي يقوم بتشغيل برنامج التحكم Mach3 أو LinuxCNC.
تتمثل مهمة السائق في تغيير التيار في اللفات بفعالية قدر الإمكان، وبما أن محث اللفات ودوار محرك السائر الهجري يتداخل باستمرار في هذه العملية، فإن برامج التشغيل مختلفة تماما عن بعضها البعض مع خصائصها وجودة الحركة الناتجة. يحدد التدفق الحالي في اللفات حركة الدوار: القيمة الحالية تحدد عزم الدوران، فإن ديناميك تؤثر على التوحيد، إلخ.
أنواع (أنواع) برامج التشغيل SD
يتم تقسيم السائقين من خلال طريقة تنزيل التيار في لف عدة أنواع:
1) السائقين الجهد الجاف
تقوم هذه السائقين بتغذية مستوى الجهد المستمر بالتناوب على المتعرج، يعتمد هذا الأمر الناتج على مقاومة العناية، وبسرعات عالية - ومن الحث. هذه السائقين غير فعالة للغاية، ولا يمكن استخدامها إلا بسرعات منخفضة للغاية.
2) السائقين دوبلكس
في برامج تشغيل هذا النوع، يترتفع الحالي في المرن في المرجع الأول إلى المستوى المرغوب باستخدام الجهد العالي، ثم يتم إيقاف تشغيل مصدر الجهد العالي، ويتم الحفاظ على التيار المطلوب من قبل مصدر الجهد المنخفض. مثل هذه السائقين فعالة للغاية، من بين أمور أخرى، أنها تقلل من تسخين المحركات، ولا يزال بإمكانهم الاجتماع في بعض الأحيان في معدات عالية المستوى. ومع ذلك، فإن مثل هذه السائقين مدعومة فقط حسب الوضع خطوة وشبه الخطوة.
3) سائقي القمح.
في الوقت الحالي، تعد برامج تشغيل PWM من سائر المحركات الأكثر شعبية، تقريبا جميع السائقين في السوق - هذا النوع. يتم تقديم برامج التشغيل هذه لتتعايدة إشارة PWM موتور السائر ذات جهد مرتفع للغاية، والتي يتم قطعها لتحقيق المستوى الحالي. يتم تعيين قيمة التيار الذي تم تعيينه من أجله إما عن طريق مقياس الجهد أو مفتاح تراجع، وأحيانا يتم برمجة هذه القيمة باستخدام برنامج خاص. هذه السائقين مثقفون للغاية، وهي مجهزة بمجموعة متنوعة من الوظائف الإضافية، ودعم انقسامات الملعب المختلفة، مما يجعل من الممكن زيادة اختصار المواقع والنعومة. ومع ذلك، فإن برامج تشغيل PWM مختلفة تماما عن بعضها البعض. بالإضافة إلى خصائص مثل الجهد العرض والحد الأقصى الحالي لف الحالي، فإنها تختلف في تردد PWM. من الأفضل أن يكون تردد السائق أكثر من 20 كيلو هرتز، وبشكل عام، أكثر من ذلك، كلما كان ذلك أفضل. يتعرض التردد أدناه 20 كيلو هرتز بخصائص القيادة للمحركات ويسقط في نطاق مسموع، ويبدأ سائر المحركات في جعل ذروة غير سارة. برامج تشغيل محركات السائر في أعقاب المحركات نفسها تنقسم إلى Unipolar و Bipolar. توصي أدوات الآلات غير البداية بشدة بعدم تجربة محركات الأقراص، ولكن اختر أولئك الذين يمكنك الحصول على أقصى قدر من الدعم الفني والمعلومات والمنتجات الموجودة في السوق على نطاق واسع. هذه هي برامج تشغيل المحركات السائر الهجينة القطبية.
كيفية اختيار سائق محرك خطوة (SD)
المعلمة الأولىوالتي تستحق الاهتمام عند قررت اختيار سائق محرك خطوة - هذه هي قوة التيار الذي يمكن أن يوفره برنامج التشغيل. كقاعدة عامة، قابلة للتعديل بمجموعة واسعة إلى حد ما، ولكن يستحق أن يحتاج السائق إلى اختيار مثل هذه التي يمكن أن تنتج الحالية للمساواة في المرحلة الحالية من محرك الخطوة المحدد. من المرغوب فيه، بالطبع، أن أقصى سائق للسائق هو آخر 15-40٪ آخر. من ناحية، سوف يعطي الأسهم في حال كنت ترغب في الحصول على لحظة أكبر من المحرك، أو في المستقبل وضع أكثر من محرك قويمن ناحية أخرى، لن يكون المفرط: الشركات المصنعة أحيانا "تخصيص" تصنيفات المكونات الإلكترونية الراديوية إلى واحد أو نوع آخر من المحركات، لذلك سائق قوي جدا لمدة 8 أ، والسيطرة على NEMA 17 Motor (42 مم )، قد يسبب، على سبيل المثال، الاهتزاز غير الضروري.
اللحظة الثانية - هذا هو الجهد العرض. المعلمة مهمة للغاية ومغمة. نفوذها متعدد الأوجه - يؤثر جهد العرض على الديناميات (لحظة) الثورات العالية)، الاهتزاز، تدفئة المحرك والسائقين. عادة ما يكون الحد الأقصى لجهد إمدادات الطاقة يساوي تقريبا الحد الأقصى الحالي الذي تضاعفته 8-10. إذا كان الحد الأقصى لعظم الجهد الأقصى لبرنامج التشغيل المحدد يتم تختلف الجهد بشكل حاد عن هذه القيم - فمن الضروري أن يسأل ما هو السبب في هذا الفرق. كلما زاد الحث للمحرك - كلما كان الجهد المطلوب للسائق. هناك صيغة تجريبية U \u003d 32 * SQRT (L)، حيث L هو الحث لفات خطوة الرياح. قيمة U، التي تم الحصول عليها وفقا لهذه الصيغة، تقريبية للغاية، لكنها تتيح لك التنقل عند تحديد برنامج التشغيل: يجب عليك تساوي تقريبا أقصى قيمة صالحة للسائق. إذا كنت قد استلمت U إلى 70، فإن برامج EM706 و AM882 و YKC2608M-H يمر في هذا المعيار.
الجانب الثالث - وجود المدخلات المظاهرة. في جميع برامج التشغيل والتحكم في المصانع تقريبا، كل العلامة التجارية أكثر، مطلوب Tluorie، لأن برنامج التشغيل هو جهاز إلكترونيات الطاقة، ويمكن أن يؤدي استراحة المفتاح إلى نبض قوي على الكابلات التي تتغذى إشارات التحكم، و تحرير تحكم CNC باهظة الثمن. ومع ذلك، إذا قررت اختيار برنامج تشغيل SD طراز تخزين، فمن الضروري أن يطلب من وجود المدخلات والمخرجات.
الجانب الرابع - وجود آليات إخماد الرنين. إن صدى محرك السائر هو الظاهرة التي تتجلى دائما نفسها، والفرق هو فقط في تردد الرنين، والذي يعتمد في المقام الأول على لحظة القصور الذاتي للحمل، وجهد العرض للسائق وقوة مرحلة المحرك المثبتة. إذا حدث الرنين، يبدأ محرك السائر في الاهتزاز وفقدان عزم الدوران، حتى المحطة الكاملة للعمود. بالنسبة لقمع الرنين، يتم استخدام microbgs و - خوارزميات تعويض الرنين المدمجة. ينشئ محرك خطيف المحرك السائر Microcolment من الحث EMF في اللفات، وحسن شخصيته وسعة السائق، يحدد السائق ما إذا كان هناك صدى وكيف قوي. اعتمادا على البيانات المستلمة، ينزلق برنامج التشغيل خطوات موتينية قليلا بمرور الوقت بالنسبة لبعضها البعض - هذه مستويات التفاوت الاصطناعية الرنين. يتم بناء آلية إخماد الرنين في جميع\u003e السائقين Leadshine DM و AM و EM. برامج التشغيل مع قمع الرنين هي برامج تشغيل عالية الجودة، وإذا كانت الميزانية تسمح لك بأخذها بشكل أفضل. ومع ذلك، دون هذه الآلية، لا يزال السائق جهاز عمل تماما - الجزء الأكبر من السائقين المباعين - دون تعويض عن الرنين، وعشرات الآلاف من الآلاف من العمل دون أي مشاكل في جميع أنحاء العالم ونفي مهامهم بنجاح.
الجانب الخامس - الجزء البروتوكول. تحتاج إلى التأكد من أن برنامج التشغيل يعمل على البروتوكول الذي تحتاجه، ومستويات إشارات الإدخال متوافقة مع المستويات المنطقية المطلوبة. هذا الشيك هو العنصر الخامس، لأنه من خلال استثناء نادر، يعمل العدد الساحر للسائقين عبر الخطوة / DIR / تمكين ومتوافق مع مستوى إشارة 0..5 V، تحتاج فقط إلى التأكد فقط.
الجانب السادس - وجود وظائف واقية. من بينها، الحماية من الفائض من جهد العرض، التيار للملفات (بما في ذلك من ماس كهربائيات من اللفات)، من عكس الجهد العرض، من الاتصال الخاطئ مراحل محرك الخطوة. كلما كانت هذه المهام - أفضل.
الجانب السابع - وجود أوضاع التحول الدقيق. الآن تقريبا في كل سائق هناك العديد من أوضاع الصغرات. ومع ذلك، من كل قاعدة هناك استثناءات، وفي برامج تشغيل Geckodrive خطوة واحدة فقط 1/10. هذا مدفوع بحقيقة أن الانقسام الإضافي لا يجلب دقة أكبر، مما يعني عدم حاجة. ومع ذلك، فإن الممارسة تظهر أن MicrosGGE على الإطلاق لا تزيد على الإطلاق عن اختصاص المواقع أو الدقة، ولكن من خلال حقيقة أن تقسيم الخطوة الأكبر، والحركة السلسة لعمود المحرك وأقل رديئة. تبعا لذلك، فإن جميع الأشياء الأخرى هي ظروف متساوية تستحق استخدام التقسيم أكثر من أكثر، كلما كان ذلك أفضل. سيتم تحديد أقصى شعبة الخطوة المسموح بها ليس فقط على جداول برادي المدمجة في برنامج التشغيل، ولكن أيضا أقصى تردد إشارات الإدخال - لذلك، بالنسبة للسائق مع تردد الإدخال 100 كيلو هرتز، فإنه لا معنى له استخدام القسم 1 / 256، نظرا لأن السرعة الدورانية ستتقتصر على 100000 / (200 * 256) * 60 \u003d 117 دورة في الدقيقة، والتي بالنسبة لمحرك السائر صغير جدا. بالإضافة إلى ذلك، فإن الكمبيوتر الشخصي سيكون قادرا أيضا على توليد إشارات بتردد أكثر من 100 كيلو هرتز. إذا كنت لا تخطط لاستخدام جهاز تحكم CNC الأجهزة، فسيكون 100 كيلو هرتز على الأرجح سقفك، والذي يتوافق مع القسم 1/32.
الجانب الثامن - وجود وظائف إضافية. قد يكون هناك الكثير منهم، على سبيل المثال، وظيفة تعريف "انهيار" - إيقاف مفاجئ للعمود عند التشويش أو نقص محرك السائر، مخرجات مؤشر خطأ خارجي، إلخ. كلهم ليسوا ضروريا، ولكن يمكن أن يخففوا إلى حد كبير عند بناء جهاز.
الجانب التاسع والأهم- سائق الجودة. لا يرتبط عمليا بالخصائص، إلخ. هناك العديد من المقترحات في السوق، وأحيانا تتوافق خصائص برامج تشغيل المنتجين تقريبا على الفاصلة، ووضعها بدورها على الجهاز، يصبح من الواضح أن أحد الشركات المصنعة لا يشارك في أعمالهم، و في إنتاج الحديد غير مكلفة فهو محظوظ أكثر. تحديد مستوى السائق مقدما لنوع من البيانات غير المباشرة أمر صعب للغاية بالنسبة للوافد الجديد. يمكنك محاولة التركيز على عدد الوظائف الذكية، مثل "الكشف عن المماطلة" أو قمع الرنين، وكذلك استخدام الطريقة المثبتة - للتنقل على العلامات التجارية.
تقدم المقالة المخططات الأساسية للخيارات لتحقيق تحكم خطوة بخطوة غير مكلفة وغير مكلفة البرمجيات (البرامج الثابتة) له.
وصف عام.
تم تصميم وحدة تحكم Stepping Motor على وحدة تحكم PIC 12F629. هذا هو 8 ميكروكماني الناتج يستحق ما مجموعه 0.5 دولار. على الرغم من المخطط البسيط وتكلفة منخفضة للمكونات، توفر وحدة التحكم خصائص عالية إلى حد ما ووظائف واسعة.
- تحتوي وحدة التحكم على خيارات للتحكم في كل من Unipolar و Bipolar محرك المشي.
- يوفر تعديل سرعة المحرك على نطاق واسع.
- لديها خطوتين خطوات التحكم:
- خطوة كاملة
- هيميسفان.
- يوفر التناوب في الاتجاهات المباشرة والعكس.
- وضع أوضاع، معلمات، يتم إجراء عنصر تحكم تحكم بواسطة أزرار وعلى إشارة (إدراج).
- عند إيقاف تشغيل الطاقة، يتم حفظ جميع الأوضاع والمعلمات في الذاكرة غير المتقلبة لوحدة التحكم ولا تتطلب إعادة التثبيت عند تشغيلها.
لا تملك وحدة التحكم حماية ضد الدوائر القصيرة من لفات المحرك. لكن تنفيذ هذه الوظيفة يعقد بشكل كبير يعقد المخطط، وإغلاق اللفات هو الحال نادر للغاية. أنا لم آخذ عبر هذا. بالإضافة إلى ذلك، لا يتسبب الحلقة الميكانيكية لعمود الحركة أثناء الدوران في الدوران لا تتطلب تيارات خطيرة وحماية السائق.
حول أوضاع وطرق إدارة محرك السائر يمكن قراءتها عن الغواصين.
رسم تخطيطي لوحدة تحكم السائر غير القطبية مع السائق على الترانزستورات القطبية.

اشرح في المخطط وخاصة لا شيء. إلى وحدة تحكم الموافقة المسبقة عن علم متصلة:
- أزرار "+" و "-" (من خلال الإدخال التناظرية للمقارنة)؛
- على إشارة (قوة المحرك على)؛
- برنامج التشغيل (Transistors VT1-VT4، الثنائيات الواقية VD2-VD9).
يستخدم الموافقة المسبقة عن علم مولد الثقة الداخلية. يتم تخزين أوضاع ومعلمات في EEPROM الداخلية.
يوفر رسم تخطيطي للسائق على الترانزستورات القطبية KT972 تيار تحول يصل إلى 2 أ، جهد اللفات يصل إلى 24 خامسا.
أنقذت وحدة التحكم على الأحجام بأبعاد 45 × 20 ملم.

إذا لم يتجاوز تيار التبديل 0.5 أ، يمكن استخدام الترانزستورات من سلسلة BC817 في مرفقات SOT-23. سوف يتحول الجهاز إلى مصغرة تماما.
التحكم في البرامج والتحكم.
يتم كتابة البرامج المقيمة على مجمع مع إعادة تثبيت دوري لجميع السجلات. البرنامج لن يعتمد من حيث المبدأ. تحميل البرامج (البرامج الثابتة) ل PIC12F629.
التحكم في التحكم كافية.
- مع الإشارة النشطة "ON" (مغلقة على الأرض)، فإن المحرك هو الغزل، مع غير نشط (قطع من الأرض) - توقف.
- عند تشغيل المحرك (يتم تشغيل الإشارة النشطة)، يغير الزر "+" و "-" سرعة الدوران.
- كل الضغط على زر "+" يزيد من السرعة إلى الحد الأدنى من التقليل.
- الضغط على زر "-" - يقلل من السرعة.
- عند إجراء أزرار "+" أو "-"، تزيد سرعة الدوران بسلاسة أو تنخفض، بمقدار 15 قيم تقليل في ثانية.
- عندما يتم إيقاف المحرك (الإشارة على غير نشطة).
- الضغط على زر "+" يحدد وضع الدوران في الاتجاه الأمامي.
- الضغط على زر "-" يترجم وحدة تحكم إلى وضع الدوران قابل للعكس.
- لتحديد الوضع، هناك حاجة ماسة خطوة كاملة أو نصف خطوة عند تطبيق الطاقة على وحدة التحكم، يتم الضغط على زر "-". سيتم تغيير وضع التحكم المحرك إلى آخر (مقلوب). يكفي تحمل الزر - ضغط لمدة 0.5 ثانية.
مخطط لوحدة تحكم السائر أحادي القطب مع سائق على الترانزستورات MOSFET.

تتيح لك الترانزستورات Low-Transhold Mosfet إنشاء برنامج تشغيل مع معلمات أعلى. تطبيق في برنامج تشغيل الترانزستورات MOSFET، على سبيل المثال، IRF7341 يعطي المزايا التالية.
- مقاومة الترانزستورات في حالة مفتوحة لا تزيد عن 0.05 أوم. وهذا يعني انخفاض الجهد الصغير (0.1 فولت عند 2 أ)، والترانزستورات لا تسخين، لا تتطلب مشعات تبريد.
- الترانزستور الحالي يصل إلى 4 أ.
- الجهد يصل إلى 55 خامسا
- في 8، وضعت حالة الإخراج SOIC-8 الترانزستورات. أولئك. سيتطلب تنفيذ السائق 2 مباني مصغرة.
لا يمكن تحقيق هذه المعلمات على الترانزستورات القطبين. مع تبديل الحالية، أكثر من 1، أوصي بشدة إصدارات الترانزستورات MOSFET.
الاتصال بوحدة تحكم Motors Unipolar Stepper.
في وضع Unipolar، يمكن أن تعمل محركات مع تكوينات متعرجة 5 و 6 و 8 أسلاك.
مخطط اتصال لمحرك السائر أحادي القطب مع 5 و 6 أسلاك (مخرجات).

بالنسبة إلى FL20STH، FL28STH، FL35ST، FL39ST، FL42STH، FL57ST، FL57STH، FL57STH مع تكوين اللفات 6 الأسلاك، يتم تمييز الاستنتاجات بالألوان التالية.

التكوين مع 5 أسلاك هو خيار يتم فيه توصيل أسلاك اللفات المشتركة داخل المحرك. مثل هذه المحركات هي. على سبيل المثال، PM35S-048.

يمكن تنزيل الوثائق في Motor PM35S-048 Stepping بتنسيق PDF.
مخطط اتصال المحرك السائر أحادي الهويبول مع 8 أسلاك (مخرجات).

نفس الشيء بالنسبة للإصدار السابق، تحدث كل اتصالات فقط من اللفات خارج المحرك.
كيفية اختيار الجهد لمحرك السائر.
وفقا لقانون أوم من خلال مقاومة العناية والمرحلة المسموح بها الحالية.
U \u003d iPhazy * Robs
يمكن قياس مقاومة المراهق DC، ويجب توقيع التيار في البيانات المرجعية.
نؤكد أننا نتحدث عن السائقين البسيطين الذين لا يوفرون نموذجا حاليا ومعقدا للجهد. تستخدم هذه الأوضاع بسرعات عالية من الدوران.
كيفية تحديد لفات موتور السائر إذا لم يكن هناك بيانات مرجعية.
في محركات Unipolar مع استنتاجات 5 و 6 استنتاجات، يمكن تحديد متوسط \u200b\u200bالإنتاج، والقياس، ومقاومة اللفات. بين المراحل، ستكون المقاومة كبيرة أكبر قدرها بين الاستنتاج والمرحلة المتوسطة. متوسطة الاستنتاجات متصلة بمصدر الطاقة بالإضافة إلى.
علاوة على ذلك، يمكن تعيين أي من استنتاجات المرحلة للمرحلة A. 8 سيكون هناك 8 خيارات للتخطيط. يمكنك الذهاب من خلالها. إذا اعتبرنا أن لف المرحلة B لديه أسلاك مختلفة مختلفة، يصبح الخيارات أقل. جبين لفات المرحلة لا يؤدي إلى فشل السائق أو المحرك. جذع المحرك ولا تدور.
من الضروري فقط أن نتذكر أن سرعة الدوران مرتفعة للغاية إلى نفس التأثير (الإخراج من المزامنة). أولئك. من الضروري تثبيت سرعة الدوران.
ثنائي القطب يخطو دائرة تحكم المحرك مع برنامج L298N متكامل.
نظام ثنائي القطب يعطي مزايتين:
- يمكن استخدام المحرك مع أي تكوين اللفات تقريبا تقريبا؛
- حوالي 40٪ يزيدون عزم الدوران.
إنشاء مخطط قيادة ثنائي القطب عن العناصر المنفصلة - السبب غير القانوني. من الأسهل استخدام برنامج التشغيل المتكامل L298N. الوصف باللغة الروسية هو.
يبدو أن دائرة وحدة التحكم مع برنامج تشغيل L298N ثنائي القطب مثل هذا.

يتم تضمين برنامج التشغيل L298N في الرسم البياني القياسي. يوفر هذا الخيار من وحدة التحكم التيارات المرحلة تصل إلى 2 أ، جهد يصل إلى 30 خامسا.
الاتصال بوحدة تحكم خطوة ثنائي القطب.
في هذا الوضع، يمكن توصيل المحرك بأي تكوين اللفات 4، 6، 8 أسلاك.
مخطط اتصال من محرك الأقراص الثنائية يخطو محرك 4 أسلاك (مخرجات).

بالنسبة للمحركات FL20STH، FL28STH، FL35ST، FL39ST، FL52STH، FL57ST، FL57STH مع تكوين اللفات 4 الأسلاك، يتم تمييز الاستنتاجات بالألوان التالية.
مخطط الاتصال من محرك خطوة ثنائي القطب مع 6 أسلاك (مخرجات).

للمحركات FL20STH، FL28STH، FL35ST، FL39ST، FL57STH، FL57STH، FL57STH مع هذا التكوين من اللفات، يتم وضع علامة على الاستنتاجات بالألوان التالية.
يتطلب مثل هذا المخطط الجهد التوريد مرتين مقارنة بإدراج Unipolar، لأن مقاومة اللفات ضعف ما. على الأرجح، يجب توصيل وحدة التحكم ب 24 خيطا
مخطط الاتصال من محرك خطوة ثنائي القطب مع 8 أسلاك (مخرجات).
قد يكون هناك خياران:
- مع إدراج متتالي
- مع الاندماج الموازي.
مخطط إدراج التسلسل للملفات.

يتطلب المخطط بدوره المتسلسل على اللفات مرة أخرى من الرياح. لكن المرحلة الحالية لا تزيد.
رسم تخطيطي لإدراج اللفات المتوازي.

يزيد المخطط مع التحول الموازي على اللفات الذي تيارات مرحلة مرتين. يمكن أن تعزى مزايا هذا المخطط، محاثة منخفضة لفات المرحلة. هذا مهم في معدلات عالية السرعة.
أولئك. يتم تحديد الاختيار بين الإدراج المتسلسل والتوازي للمحرك ثنائي القطب السائر مع 8 يؤدي بواسطة المعايير:
- أقصى محرك الأقراص الحالية؛
- الجهد السائق الأقصى؛
- سرعة دوران المحرك.
البرامج (البرامج الثابتة) ل PIC12F629 يمكن تنزيلها.
لذا، فكر في برنامج السائق على الخشب من الخشب من Bipolarnikists، لم أكن أعتقد أن الموضوع سيؤدي إلى أن هذه الاهتمام وسيتعين عليك كتابة مقالة صغيرة في التجميع والتكوين. هنا سيتم اعتبار سائق ككتلة منفصلة. لأن أنا استخدام تصميم كتلة. أولئك. ثلاثة برامج تشغيل، لوحة واجهة، امدادات الطاقة. أولا، عند فشل برنامج تشغيل واحد، يقوم برنامج التشغيل بتغيير ببساطة على الاحتياط، وفي الثانية (والأهم من الأهم من ذلك) من المقرر ترقية، فمن الأسهل بالنسبة لي إزالة برنامج تشغيل واحد، ووضع الإصدار المرحوب للتشغيل. "حزمة واحدة" هي بالفعل تطور الموضوع، وأعتقد أنني سأجيب على أسئلة حول تكوين UPSدي جي _ الذكية. وكذلك تكمل وتصحيح عملي. والآن إلى هذه النقطة ...
البند أولا (لا يمكنك قراءة الرسومج. ). بعد النقش، العزاني، والتدريبات، فحص بعناية المجلس بأكمله لجاما. مخاط، مسارات محفورة، إلخ. يمكن أن تقسم بجدية الطنانة بأكملها. بعد ذلك، تقوم بإطعام الرسوم، أولا كل صدام، ثم المقاومة والثنائيات والألواح والحاويات والترانزستورات القطبين. انا اريد ان ارسم انتباه خاص انتباهكم، آسف ل ... لا تكون كسولا قبل أن تحقق PRIPA من عنصر الخير. يحفظ Transvelca أحيانا من الدخان ... أعرف أن ترميز الألوان للمقاومات مع اثارة ضجة، وهزت عدة مرات ومع عروض خاصة. تأثيرات. عند استخدام المقاومات من العسل، سقطت السنوات من كل ما سيندرك تحت الذراع، ونسيان أنه عندما يمكن أن تصبح التدفئة الحمراء برتقالية، ورقية برتقالية - أصفر ... نحن خفض امدادات الطاقة + 5 فولت، خطوة،GND. والأسلاك السيطرةvref. وبعد حول بهذه الطريقة تبدو:

نقطة الثانية (إعداد التشغيل وعقد أوضاع). 555 أنا شخصيا أذهب إلى الرسوم التي وضعت اللوحة، مما يعني أنه يجب قطع اتصال وحدة العرض. المتعريات في الوسط. خطوة العرض عن طريق الإغلاق في وضع مشترك (وضع الرقيق). نيك السلسلة + 5V وإذا لم يكن قصيرا، ندير الطاقة. اختبار متصل بالمراقبة النقاطVref (أحسنت DJ _ الذكية ، المقدمة على المجلس)، إذا تتوافق معدلات السكتات الدماغية والمقاومة بين المخطط، فإن العبد هو السكتة الدماغية. يمكن أن ضبط الأوضاع من الجهد حوالي 0 - 1V I.E. 0 - 5A الحالي. تعرف على 1A. كل شيء بسيط هنا.رديئة يتغيرون لدينا 0.2 أوم. نحن بحاجة إلى 1A. 0.2х1 \u003d 0.2V. أولئك. إذا قمنا بتثبيتvref. - 0.2V، الحالي في لف سيكون 1A. إذا كنا بحاجة إلى حالية في لف، قل 2،5A، ثمvref \u003d 0.2х2.5 \u003d 0.5V.
باختصار، وضعنا 0.2V.

الآن رائحة الخطوة والمجتمع. إذا كانت جميع العناصر طبيعية ووفقا للنظام، ثم بعد فتح حوالي نصف ثانيةvref. ينخفض \u200b\u200bمرتين (إذا تم إعداد الانتهازي الثاني في الوسط)vref. معلق. لدي 50 في المئة. من العامل:

الشيء الرئيسي هو الانتباه إلى التأخير الإلزامي عند التبديل. عند إغلاق الخطوة إلى عام، يجب تشغيل وضع التشغيل على الفور، وعند فتحه هو الاحتفاظ بتأخير 0.5C. إذا لم تكن هناك تأخير، فابحث عن مشاكل، وإلا فلن تكون هناك مواطن مخاطقة مشابك عند العمل. إذا لم تبدأ، فانتقل إلى موضوع المنتدى، فلا ترتيب الحرائقج.
النقطة الثالثة (تخصيص وحدة المؤشر). مطلق الختم أقل من 315-361، وكذلكدي جي _ Smarta. أيضا حقيبة، تحتاج إلى اللحام في مكان ما ... ولكن من حيث المبدأ، يمكنك اللحام أي زوج، من لنا عاشت 502 - 503، 3102 - 3107، كل شيء المحاريث، فقط تكون منتبهة مع الشد! إذا كان كل شيء ملحوظا بشكل صحيح والعمل، فإنه يعمل دون مشاكل. المؤشر يجعل تعديل صغير فيvref. لذلك بعد توصيل المؤشر، قم أخيرا بضبط التيار تحت SHD الخاص بك (أفضل لبدء 70٪ من الاسمية). صور مثل المصابيح لا تحترق لمج.
البند الرابع، مهم (297) تشغيله من الطاقة إلى 327 في مكانك. نتحقق مرة أخرى من التثبيت، وعناصر الربط، إذا كان كل شيء على ما يرام (مع أي شك نحن نتحقق مرتين) نحن نقدم وجبات الطعام. التحقق من الذبذبات إشارة على المحطة الأولى، هو:

إما على 16 أرجل، فهي:

هذا يعني أن PIEM بدأت، وحظا محظوظا بمقياس التردد يمكن أن يقيس التردد، فيجب أن يتوافقه تقريبا إلى 20 كيلو هرتز.
الانتباه!!! انه مهم!!!حتى لو لم يبدأ PWM، فإن الجزء المنطقي 297 سيعمل، أي عند توصيل الحمل، ستذهب جميع الإشارات ... ولكن عد 24 فولت دون Shim 2. لذلك من المهم التأكد من بدء مولد Microcircuit.
النقطة الخامسة. أطفئ الطاقة مرة أخرى وأدخلحية ، ضربنا الخشب. عند استخدام SHD مع تيار لف أكثر من 2،5A، من الضروري تحمل العشب إلى المبرد. يرجى ملاحظة متى يتم رش الثنائيات، فقد تختلف. أنا حقا لم يجتمع (أدرج 522 و 1ن. 4148 (التناظرية) لديهم codoolevka يتزامن) ولكن النظر في الناسحية
النظر في سائق المحرك الكهربائي على الترانزستورات و Microcircuit L298، وسوف نتعامل مع مبدأ عمل جسر H. نحن نتعلم ميزات توصيل برامج التشغيل على L298 إلى محركات مختلفة ومصادر الطاقة، سنقوم بإجراء تجارب بسيطة مع محركات السائر ومحركات الجهد المستمر. الاتصال ب Raspberry Pi وأبسط البرامج لاختبار التحكم في برنامج التحكم.
ما هو جسر h
عند تصميم الآلات والروبوتات والأجهزة الآلية الأخرى، هناك حاجة للتحكم في المحرك الكهربائي التيار المباشر أو لفائف محرك السائر. من أجل أن تكون قادرا على التحكم في لف المحرك وجعل رمحها تدوير في اتجاهات مختلفة، فمن الضروري إجراء التبديل مع الفدية. لغرض مماثل، يتم استخدام ما يسمى "H-Bridge".
لماذا هذا الاسم؟ - نظرا لأن التبديل على المحرك وتحويل مفاتيح التبديل يذكرنا بالحرف اللاتيني H. مبادئ عملية H-Bridge تظهر إلى Natrunk أدناه.
تين. 1. كيف يعمل H-Bridge، مبدأ تبديل المحرك للتناوب في اتجاهات مختلفة.
نظرا لأننا نرى، بمساعدة 4 مفاتيح، يمكننا توصيل المحرك بمصدر طاقة في قطبية مختلفة، مما يؤدي بدوره إلى تدوير عموده في اتجاهات مختلفة. يمكن استبدال المفاتيح بالترحيل، أو على مفاتيح إلكترونية قوية على الترانزستورات.
من المهم ملاحظة أنه من المستحيل استخدام مفتاحين على جانب واحد من جسر H، حيث اتضح ماس كهربائى، عند تصميم دائرة جسر، من الضروري وضع هذه القاعدة في المنطق وبالتالي تنفيذ الحماية.
مخطط بسيطة H- جسر على الترانزستورات السيليكون
جمع سائق محركات DC بسيطة (أو الرياح محرك السائر) على الترانزستورات السيليكون المشتركة.
![]()
تين. 2. مخطط تخطيطي سائق محرك كهربائي بسيط على الترانزستورات السيليكون.
يتيح لك هذا السائق التحكم في محرك العاصمة مع جهد امدادات الطاقة يصل إلى 25 فولت (ل CT817A، KT816A) وما يصل إلى 45V (ل CT817B-G، KT816B-G) بدون أكثر من 3A. مع وجود محركات كبيرة تحميل محرك، يجب تثبيت الترانزستورات الإخراج من KT817 و KT816 على مشعات كافية.
يتطلب تثبيت الثنائيات VD1-VD2، مطلوبة لحماية الترانزستورات الإخراج من التيار الخلفي. في مكانهم، يمكنك وضع CD105A المحلي أو غيرها من أجل تيار أكبر.
بعد أن جمعت اثنين من المخططات (الترانزستورات 2x6)، يمكنك أيضا التحكم في محرك خطوة أو محركين DC.
من أجل عدم صنع حديقة من 12 الترانزستورات، يمكنك تطبيق رقائق متخصصة، أدناه ننظر إلى مثال مع Microcham L298 وكتل منتهي بناء عليه.
رقاقة L298، الخصائص والميزات
رقاقة L298 Integral هي برنامج تشغيل جسر عالمي قوي لإدارة محركات العاصمة ومحركات السائر والمرحلات الكهرومغناطيسية والكهرومغنط الكهرومغنطيات (الملفات اللولبية). يحتوي Microcircuit على جسرين H-Bridges المصنوع من الترانزستورات القوية، وكذلك منطق متوافق مع TTL.

تين. 3. رقاقة L298 في مرفقات Powerso20 MultiWatoT15.
المواصفات الأساسية:
- تشغيل الجهد - يصل إلى 46V؛
- الحد الأقصى الحالي الدائم - 4A (مع الرادياتير)؛
- انخفاض الجهد التشبع
- الحماية من الحرارة الزائدة؛
- المنطقية "0" \u003d الجهد يصل إلى 1.5V.
أين يمكنني تطبيق السائق على رقاقة L298؟ - العديد من الأفكار:
- خطوة التحكم في المحرك؛
- السيطرة على اثنين من محركات DC (محركات العاصمة)؛
- تبديل لفائف المرحلات القوية؛
- السيطرة على الملف اللولبي (الكهرومغنغنطوي).
إذا نظرت إلى مخطط الكتلة من رقاقة L298، فيمكننا أن نرى شيئا ما على تشابه المخطط في الشكل 2، فقط مع عناصر منطقية إضافية.

تين. 4. داخلي L298N Microcircuit DieGram هو جسر H- جسر قوي مزدوج.
لكل جسر H، لدينا 3 مدخلات: IN1 - لتزويد الجهد في اتجاه واحد، IN2 - في العكس، ومدخلات أخرى لإمدادات الطاقة إلى الترانزستورات الإخراج من الجسر.
وبهذه الطريقة، يمكننا تعيين اتجاه المرور والتحكم فيه (ممكن أو تعطيل، وكذلك PWM).
دائرة سائق على رقاقة L298
يوجد أدناه مخطط بسيط لسائق المحرك على Microcircuit L298N. يتم إجراء الإدارة في أربع أسلاك (بدلا من ستة في L298) من خلال استخدام العاكسات الإضافية في رقاقة CD4011.

تين. 5. مخطط تخطيطي لسائق المحركات الكهربائية على رقاقة L298N.
لتشغيل منطق كل من الرقائق، فإن الجهد المستقر هو + 5V (P2)، يمكنك استخدام تثبيت متكامل، على سبيل المثال L7805 أو تغذية المنطق من خط الطاقة الموجود + 5V. لإطعام الجهد الكهربائي للمحركات، يتم استخدام خط الطاقة P1 منفصل.
يتم استخدام استنتاجات P4، P5 استنتاجات لتعيين قطبية كل من القنوات، ويسمح باستنتاجات P6، P7 بتزويد الطاقة إلى CASCASS (مفاتيح) من الجسر H-Bridge الداخلي لكل قناة.
يمكن استبدال رقاقة CD4011 مع K176L7 المحلية. يمكن وضع الثنائيات شوتكي اسمي رمزي آخر، 35V / 4A أو أكثر. إذا كنت لا تخطط للحد من حدودي متعرج المحرك (محركات)، فيمكن استبعاد مقاومات الحد من المستوى المنخفض R9-R10 من الدائرة، واستبدالها عن صداري.
على الإنترنت، يمكنك طلب وحدة نمطية جاهزة على L298، على الرغم من أنها ستكون 6 مدخلات للتحكم.

تين. 6. وحدات جاهزة على L298.
بالنسبة لاحتياجاتي، اشتريت وحدة نمطية جاهزة حسب النوع كما في الصورة على اليسار. لديها رقاقة L298 ومثبت صغير لتغذية + 5V إلى منطق الشريحة.
لتوصيل هذا الواجهة، من المهم فهم ميزة واحدة بشكل واضح:
- إذا تم استخدام الجهد لتشغيل المحركات أكثر من 12 فولت، فيجب إزالة الطائر وخدمتها بشكل منفصل 5V على الموصل المميز بهذا.
- إذا تم تنفيذ قوة المحركات من الجهد 5-12V، فيجب أن يتسلق الطائر والسلطة الإضافية غير مطلوبة.
إذا قمت بإرسال محركات، على سبيل المثال، 20 فولت واترك العبور المثبتة، ثم يتم إلغاء تثبيت تثبيت الرقص على الوحدة النمطية. لماذا لم يضع المطورون استقرارا متكاملا مع مجموعة واسعة من فولتات المدخلات - ليس واضحا.
من أجل توفير مدخلتين عند توصيل مثل هذه الكتلة إلى Arduino أو Raspberry Pi، يمكنك إضافة جزء من الدائرة على CD4001، كما هو الحال في الشكل 5.
L298 + DC محركات + التوت بي
لهذه التجربة، تم توصيل اثنين من محركات DC بوحدة L298. يتم تنفيذ قوة الوحدة بأكملها من بطارية واحدة إلى 6V. نظرا لأن هذا هو جهد أقل من 12 فولت (ننظر إلى الوصف أعلاه)، فسيتم ترك الطائر من المثبت الداخلي إلى الطاقة المثبتة والإضافية + 5V لنظام المنطق غير مطلوب.
تترك لاعبا "ena" و "enb"، والتي تسمح بتثبيت مزود الطاقة إلى جسور الإخراج، مثبتة. وبالتالي، للسيطرة على كل من المحركات التي نستخدمها المدخلات الأربعة المتبقية: IN1، IN2، IN3، IN4.
بعد توصيل الطاقة، سيقوم LED بتشغيل الوحدة النمطية، الآن يمكننا التقدم بطلب لكل من المدخلات بالتناوب + 5V ومعرفة كيفية تدوير محركاتنا.
أين تحصل + 5V؟ - في هذه القضية هذا الجهد موجود على موصل الطاقة، إلى اليمين بالقرب من GND. للاختبار، يمكنك استخدام قطعة من الأسلاك - الطائر.
الآن قم بتوصيل الوحدة النمطية لدينا إلى PI Raspberry واكتب برنامج اختبار بسيط على Python. لتوصيل الوحدة، استخدمت استنتاجات GPIO هنا في هذه المراسلة:

تين. 7. L298 + Raspberry Pi + DC المحركات الكهربائية.
يتم تشغيل الكمبيوتر المصغر من خلال استقرار نبض خفض البطارية الثانية لمدة 6V. دعونا ننتقل إلى كتابة برنامج لتجرينا، هدفنا هو التحكم في دوران رمح كل من المحركات باستخدام لوحة المفاتيح المتصلة ب TAPPBERRY PI أو عن بعد بواسطة SSH، VNC.
الآن حاول على برنامج بسيط مكتوب على Python، مما سيساعد على فهم مبدأ التحكم في محرك DC الكهربائية.
قم بتحميل Malinka، افتح الطرف أو الاتصال به عن بعد باستخدام SSH. قم بإنشاء ملف جديد وفتحه لتحريره باستخدام الأمر:
nano / home/pi/pi/l298_dc_motors_test.py.
أدخل رمز البرنامج النصي إلى رمز Python إلى المحرر، والذي يظهر أدناه:
#! / USR / BIN / ENC PYTHON # - * - الترميز: UTF-8 - * - استيراد وقت الاستيراد RPI.GPIO كما GPIO # إعداد دبابيس GPIO. gpio.Cleanup () gpio.setmode (gpio.bcm) gpio.setup (4، gpio.out) gpio.output (4، gpio.low) gpio.setup (17، gpio.out) gpio.output (17، gpio .ow) # تحويل دوران المحرك 1 إلى جانب واحد. gpio.output (4، gpio.high) # نحن في انتظار 5 ثوان. time.sleep (5) # قم بإيقاف تشغيل المحرك 1. gpio.output (4، gpio.low) # نحن في انتظار 10 ثوان. time.sleep (10) # قم بتشغيل دوران المحرك 1 إلى الجانب الآخر. gpio.output (17، gpio.high) # نحن في انتظار 5 ثوان. Time.Sleep (5) # قم بإيقاف تشغيل المحرك 1. gpio.output (17، gpio.low)
نترك المحرر وحفظ الملف. نجعل البرنامج النصي قابل للتنفيذ وتشغيله:
chmod + x /home/pi/l298_dc_motors_test.py/pi/pi/l298_dc_motors_test.py
بعد بدء البرنامج النصي، ستبدأ أحد المحركات بالتناوب في اتجاه واحد لمدة خمس ثوان، ثم يتم إيقاف تشغيله وبعد 10 ثوان ستبدأ بالتناوب في الجانب الآخر لمدة 5 ثوان.
فيما يلي مثال أكثر تعقيدا وعمليا للبرنامج الذي سيتفاعل مع المستخدم وسيسمح لك بالتحكم بشكل تفاعلي في المحركات الكهربائية. على غرار البرنامج النصي الأول، يمكن حفظ البرنامج في نفس الملف أو إنشاء جديد بشكل منفصل.
من المهم أن تتابع المسافات البادئة هذا المثال، لقد كتبت بالفعل عن هذا من قبل.
#! / usr / bin / env python # - * - الترميز: UTF-8 - * - استيراد نظام الاستيراد SYS استيراد الاستيراد - استيراد الوقت استيراد RPI.GPIO AS GPIO # تثبيت أرقام Pins GPIO التي سوف نعمل m1_right \u003d 4 m1_left \u003d 17 m2_right \u003d 27 m2_left \u003d 22 # وظيفة لإعداد دبابيس GPIO DEF الإعداد (* المنافذ): GPIO.Cleanup () وضع تسمية المسامير حسب الاسم، وليس حسب الرقم على لوحة GPIO.SetMode (GPIO.BCM) للمنفذ في المنافذ: # تثبيت بينينا على الإخراج + مستوى منخفض "0" gpio.setup (المنفذ، gpio.out) gpio.output (المنفذ، gpio.low) # وظيفة للتثبيت مستوى منخفض على All Pines (Shutdown) Def Stop_all (): gpio.output (m1_left، gpio.low) gpio.output (m1_right، gpio.low) gpio.output (m2_left، gpio.low) gpio.output (m2_right، gpio.low ) وظيفة للتحكم في دوران محركات Def Dutate (المحرك \u003d 1، الوضع \u003d "S"): # إيقاف تشغيل جميع المسامير Stop_all () # للمحرك 1 إذا كان المحرك \u003d\u003d 1: إذا كان الوضع \u003d\u003d "R": # قم بتثبيت مستوى عال على m1_right (4) pine (m1_right، gpio.high) elif mode \u003d\u003d "l": # تثبيت المستوى العالي على m1_left (17) الصنوبر .UTPUT (M1_left، gpio.high) # للمحرك 2 elif) Motor \u003d\u003d 2: 2: إذا كان الوضع \u003d\u003d "r": gpio.output (m2_right، gpio.high) elif mode \u003d\u003d "l": gpio.output (m2_left، gpio.high) # أداء تهيئة دبابيس GPIO الإعداد ( m1_right، m1_left، m2_left، m2_left، m2_left) # تهيئة قفل (لعنات) stdscr \u003d counses.initscr () # يتفاعل مع الضغط على المفاتيح دون تأكيد باستخدام الإدخال censes.cbreak () # السماح لاستخدام التوافق على لوحة مفاتيح stdscr.keypad (1 ) # لا تحظر البرنامج في الوقت المناسب في المرجع الأحداث الأحداث Stdscr.nodelay (1) # عرض البيانات الافتراضية على Stdscr.addstr الافتراضي (0، 10، "اضغط على" Q "للإقلاع عن التدخين") Stdscr.addstr (2، 10، "A - M1 يسار، D - M1 اليمين ") Stdscr.addstr (3، 10،"< - M2 Left, > - M2 الصحيح ") Stdscr.addstr (4، 10،" S - توقف ") Stdscr.refresh () # الدورات الرئيسية أثناء TRUE: # احصل على رمز الضغط الرئيسي والتحقق من مفتاحه \u003d Stdscr.getch () إذا كان المفتاح! \u003d - 1: # إذا كان "arrow يسار" ثم قم بتدوير المحرك 2 اليسار إذا كان المفتاح \u003d\u003d countes.key_left: # عرض السلسلة "M2<---" в позиции 6, 10 stdscr.addstr(6, 10, "M2 <---") rotate(2, "l") # Если клавиша "стрелка вправо" то вращаем движок 2 вправо elif key == curses.KEY_RIGHT: stdscr.addstr(6, 10, "M2 --->") تدوير (2،" r ") # إذا كان مفتاح" A "ثم قم بتدوير المحرك 1 إلى مفتاح ELIF الأيسر \u003d\u003d ORD (" A "): Stdscr.addstr (6، 10،" M1<---") rotate(1, "l") # Если клавиша "d" то вращаем движок 1 вправо elif key == ord("d"): stdscr.addstr(6, 10, "M1 --->") تدوير (1،" r ") # إذا كان مفتاح" S "، ثم إيقاف جميع مفاتيح محرك Elif \u003d\u003d ORD (" S "): Stdscr.addstr (6، 10،" Stop 12 ") Stop_all () # إذا كان مفتاح "S" ثم نغادر من مفتاح ELIF \u003d\u003d ORD ("Q"): # استرداد الإعدادات السابقة للمحطة الطرفية Stdscr.keypad (0) CONDES.ECHO () CONTESS.endwin () # التنظيف وإخراج OS.System ("واضح") SYS.EXIT () # تحديث النص على الشاشة وجعل زمن بيانات صغير من Stdscr.Refresh () Time.Sleep (0.01)
عن طريق تشغيل البرنامج النصي، يمكنك أن تحتاج إلى تقويض سهم لوحة المفاتيح "اليسار" و "إلى اليمين"، وكذلك المفاتيح ذات الحروف "A" و "D" - يجب أن تدور المحركات بالتناوب في اتجاهات مختلفة وفي اتجاهات مختلفة وسيعرض البرنامج وضع التشغيل الحالي.
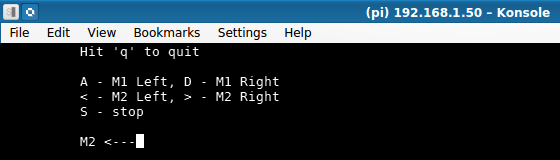
تين. 8. برنامج Python للسيطرة على المحركات باستخدام برنامج تشغيل L298 (Konsole Terminal، KDE).
تظهر أدناه عرض فيديو موجز لتشغيل هذه التجربة أدناه:
ما هو محرك السائر، أنواع الرؤوس
محرك السائر (بالنسبة لأولئك الذين لا يعرفون) - هذا محرك كهربائي لا توجد فيه فرش وملفات على الجزء الثابت (مرساة)، فهي موجودة على الدوار ويتم وضعها بطريقة تربط كل منها بالسلطة مصدر نقوم بإجراء تثبيت الدوار (نأخذ خطوة واحدة). إذا قمت بالتناوب بإطعام الجهد على كل من اللفات مع القطبية اللازمة، فمن الممكن إجبار المحرك على تدويره (لجعل خطوات متتالية) في الاتجاه المطلوب.
موتورز السائر موثوقة، وارتداء الرفوف وتسمح لك بالتحكم في دوران زاوية معينة، وتطبيق في أتمتة العمليات، في الإنتاج، في معدات الحوسبة الإلكترونية (محركات الأقراص المضغوطة، الطابعات، النسخ)، وما شابه ذلك.
مثل هذه المحركات هي الأنواع التالية:
- ثنائي القطب - يمكن استخدام 2 لفات، واحدة تلو الأخرى في كل مرحلة، للسيطرة على الدائرة على جسر 2 H أو نصف جسر واحد مع طاقة ثنائي القطب؛
- غير متطور - 2 لفات، كل منها نقرة من الوسط، إنها مريحة لتبديل المراحل عن طريق تغيير نصفي كل من اللفات، يبسط مخطط برنامج التشغيل (المفتاح 4)، وكذلك استخدام ككلار دون استخدام لف صنابير
- مع لفات ملحوظة - Universal، يمكن استخدام ربط اللفات وفقا لذلك كمحرك Capolar أو Unipolar.

تين. 9. أنواع السائر المحركات: ثنائي القطب، unipolar، مع أربعة لفات.
من الممكن تحديد نوع المحرك المستخدمة، كقاعدة عامة، من خلال عدد الاستنتاجات بشأن قضيتها، ولن تؤذي دعوة جميع الاستنتاجات مع اختبار لتحديد ما إذا كانت هناك اضطرابات بين اللفات.
L298 + محرك السائر + التوت بي
الآن دعونا نلغاء محرك التدخل، في حالتي، يتم تطبيق موتور السائر القوي القطبي المستخرج من طابعة مصفوفة القديمة.
لتوصيل محرك ثنائي القطب واحد، ستحتاج إلى نواتج سائقين على L298 (اثنين من الجسور H-Bridges). بالنسبة لهذه التجربة، يجب أن تكون وحدة L298 متصلة ب Raspberry Pi وكذلك في S.
في السابق، يمكنك تجربة بدون Malinka - للعمل بالتناوب على مدخلات الجهد L298 MODULUS 5V ومعرفة كيفية إجراء عمود المحرك خطوات.
في جوهرها، مع Malinka، سنكون بالتناوب ومع بعض التأخير لتزويد النبضات على المحرك متعرجا من لفرض رمحه للتدوير في الاتجاه الذي نحتاجه وعلى السرعة الصحيحة.

تين. 10. قم بتوصيل محرك السائر ثنائي القطب إلى وحدة L298 للتحكم في Via Raspberry Pi.
إذا كان كل شيء متصل بالفعل، ننتقل إلى تجارب مع برنامج اختبار بسيط على Python، مما سيساعدك على فهم كيفية العمل مع محرك السائر باستخدام L298 + Raspberry Pi.
قم بإنشاء ملف للحصول على البرنامج النصي وافتحه لتحرير:
nano / home/pi/pi/l298_stepper_motor_test.py.
أدخل رمز البرنامج النصي التالي إلى المحرر على Python :
#! / USR / BIN / ENC PYTHON # - * - الترميز: UTF-8 - * - استيراد وقت الاستيراد RPI.GPIO كما GPIO # إعداد دبابيس GPIO. gpio.Cleanup () gpio.setmode (gpio.bcm) gpio.setup (4، gpio.out) gpio.output (4، gpio.low) gpio.setup (17، gpio.out) gpio.output (17، gpio .Low) gpio.setup (27، gpio.out) gpio.output (27، gpio.low) gpio.setup (22، gpio.out) gpio.output (22، gpio.low) # تأخير الوقت بين الخطوات، ثانية وبعد Step_timeout \u003d 0.0105 # نبض مدة، ثانية. Impulse_timeout \u003d 0.008 # الخطوة 1. gpio.output (4، gpio.high) time.sleep (impulse_timeout) gpio.output (4، gpio.low) time.sleep (step_timeout) # الخطوة 2. gpio.output (17، gpio .high) Time.Sleep (Impulse_timeout) gpio.output (17، gpio.low) time.sleep (step_timeout) # الخطوة 3. gpio.output (27، gpio.high) time.sleep (himpulse_timeout) gpio.output (27 ، gpio.low) time.sleep (step_timeout) # الخطوة 4. gpio.output (22، gpio.high) time.sleep (himulse_timeout) gpio.output (22، gpio.low) time.sleep (step_timeout) # نحن في انتظار 10 ثوان. time.sleep (10) # 20 مرة 4 خطوات في الدورة. لأني في النطاق (0.20): gpio.output (4، gpio.high) time.sleep (impulse_timeout) gpio.output (4، gpio.low) time.sleep (step_timeout) gpio.output (17، gpio. عالية) Time.Sleep (Impulse_timeout) gpio.output (17، gpio.low) time.sleep (step_timeout) gpio.output (27، gpio.high) time.sleep (himulse_timeout) gpio.output (27، gpio.low) الوقت. النوم (step_timeout) gpio.output (22، gpio.high) time.sleep (impulse_timeout) gpio.output (22، gpio.low) time.sleep (step_timeout)
نقوم بإجراء ملف مع برنامج نصي قابل للتنفيذ وتشغيله عند التنفيذ:
chmod + x /home/pi/l298_stepper_motor_test.py / home/pi/l298_stepper_motor_test.py
يجب أن تقوم قناة تشغيل البرنامج النصي بتشغيل 4 خطوات (دوران في اتجاه واحد)، ثم انتظار 10 ثوان، وسوف يبدأ مرة أخرى دورانها وستجعلها ستجعلها 20 * 4 خطوات.
ضع في اعتبارك الآن مثالا على برنامج تفاعلي يسمح لك بالتحكم في اتجاه وسرعة الدوران (الخطوات المتسلسلة) لمحرك السائر باستخدام لوحة المفاتيح.
#! / usr / bin / env python # - * الترميز: UTF-8 - * - استيراد نظام التشغيل استيراد نظام الاستيراد استيراد الاستيراد الوقت استيراد RPI.GPIO كدالة GPIO # وظيفة لإعداد دبابيس GPIO DEF الإعداد (* المنافذ): GPIO. Cleanup () # Pins Naming Mode حسب الاسم، وليس حسب الرقم على لوحة GPIO.SetMode (GPIO.BCM) لمنفذ المنافذ: تثبيت Pina إلى الإخراج + مستوى منخفض "0" GPIO.Setup (Port، GPIO.OUT) وظيفة GPIO.Output (منفذ، GPIO.LOW) # # لتغذية نبض مع دبوس مع أداة تأخير معينة (منفذ \u003d 0): gpio.output (منفذ، GPIO.HIGH) # تعيين قيمة المهلة كن thieugh لفترة خطوة واحدة. أطيب (0.008) gpio.output (المنفذ، gpio.low) time.sleep (مهلة) # نحن نقوم بتثبيت إعداد دبابيس GPIO (4، 17، 27، 22) # تأخير بين خطوات (الافتراضي) مهلة \u003d 0.0105 # اتجاه الدوران (الافتراضي) الاتجاه \u003d "R" # تهيئة الشاشة (الوحدة النمطية) Stdscr \u003d conitscr.Initscr () # تفاعل عند الضغط على المفاتيح دون تأكيد باستخدام أدخل censes.cbreak () # استخدام التوافق Stdscr.keypad لوحة المفاتيح (1) # لا تمنع البرنامج الزمني عند الاقتراع في Stdscr.nodelay الحدث (1) # عرض على الشاشة بواسطة Stdscr.addstr (0، 10، "اضغط على" Q "للإقلاع عن التدخين") Stdscr. Addstr (2، 10، "---") Stdscr.addstr (3، 3، "مهلة:" + Str (مهلة)) Stdscr.refresh () # الدراجات الرئيسية أثناء الصواب: # مجموعة من البقول لتدوير العمود المحرك إلى اليمين إذا كان الاتجاه \u003d\u003d "R": الدافع (4) الدافع (17) الدافع (27) الدافع (22) # مجموعة من النبضات لتدوير رمح المحرك إلى اتجاه ELIF الأيسر \u003d\u003d "L": Invulse ( 22) الدافع (27) الدافع (17) الدافع (4) # قراءة رمز الضغط المفتاح والتحقق من ذلك مفتاح \u003d stdscr.getch () إذا كان المفتاح! \u003d -1: # مفتاح "اليسار" يغير اتجاه الدوران: اليسار إذا كان مفتاح \u003d\u003d countes.key_left: # يعرض النص "<---" в позиции экрана 2, 10 stdscr.addstr(2, 10, "<---") # Изменим значение переменной с направлением вращения direction = "l" # Клавиша "вправо" меняет направление вращения: ВПРАВО elif key == curses.KEY_RIGHT: stdscr.addstr(2, 10, "--->") الاتجاه \u003d" R "#" "مفتاح يسرع" بدور دوران مفتاح ELIF \u003d\u003d CONTESS.KEY_UP: # قلل من التأخير بين خطوات مهلة الخطوات \u003d مهلة - 0.0005 # "أسفل" مفتاح يبطئ دوران مفتاح ELIF \u003d \u003d cotses.key_down: # قم بزيادة التأخير بين الخطوات المهلة \u003d مهلة + 0.0005 # ف ينفذ الإخراج من المفتاح ELIF \u003d\u003d ORD ("Q"): Stdscr.keypad (0) Cotses.echo () CONTESS.endwin ( ) انظر Os.System ("واضح") SYS.EXIT () # بحيث لم يتم تمرير وقت التأخير الحدود 0 إذا انتهى المهلة<= 0: timeout = 0.0005 # Обновляем текст на экране stdscr.addstr(3, 10, "Timeout: " + str(timeout)) stdscr.refresh() time.sleep(0.01)
الآن لدينا مفاتيح الأسهم اليسرى اليسار واليمين والنظر في كيفية تغيير اتجاه دوران عمود المحرك، وعندما يتم الضغط على المفاتيح صعودا وهبوطا بسرعة ستزيد وتقليلها وفقا لذلك.
إذا كان المحرك لا يتدور، فمن الممكن أنه من الممكن تغيير قطبية اتصال أحد اللفات إلى الوحدة النمطية على L298.

تين. 11. برنامج إدارة المحركات ثنائي القطب، L298، التوت بي.
عرض الفيديو من عمل السائر العمل:
استنتاج
آمل أن يكون لديك إجابة على السؤال "ما هو جسر H وكيفية عمله"، من التجارب، يجب أن يكون من الواضح كيفية تطبيق برنامج التشغيل على رقاقة L298 وتوصيل محركات مختلفة به.
من المهم ملاحظة أنه على الإنترنت، يمكنك العثور على مكتبات وبرامج نصية جاهزة على Python لعنصر تحكم سهل المحركات باستخدام H-Bridge على L298 باستخدام Raspberry Pi.
- على الرغم من أن المحركات السائر ثنائي القطب نسبة إلى الطريق، فإنها لتوفير أبعادها الجسدية عزم الدوران العالي. ومع ذلك، بالنسبة لملفيتين من المحرك، فإن ثمانية ترانزز أدوات تحكم مطلوبة، متصلة في أربعة جسور H. يجب أن يتحمل كل الترانزستور الدوائر الزائدة والدوائر القصيرة واستعادة الأداء بسرعة. يتطلب سائق، على التوالي، خطط حماية معقدة بعدد كبير من المكونات السلبية.

الصورة 1
الشكل 1. رقاقة واحدة في سكن التثبيت السطحي والعديد من المكونات السلبية يمكن أن تتحكم في محرك السائر ثنائي القطب.
إدارة محرك السائر ثنائي القطب
سائق محرك السائر مع يديه - يوضح الشكل 1 مخططا بديلا سائق محركا يعتمد على مكبر صوت مكسيم. يمكن إعطاء Microcircuit Max9715 في حالة مصغرة لتثبيت السطح الطاقة إلى 2.8 W في حمولة نموذجية من 4 أو 8 أوم. يتم تشكيل كل من الشريطين بواسطة الجسور H-H-Bridges من MOSFET قوية، وأزواج التحكم من OUTER + و OUR- و Outls + Sleed يولد كل زوج إشارة نبض بتعديل خطوط خطوط التخزين الفارسية مع تردد تبديل اسمي قدره 1.22 ميجاهرتز. يزيل مستوى صغير من التدخل، الذي أنشأه المخطط، الحاجة إلى مرشحات الإخراج.
مكثفات تقاطع
تعمل CAPACITORS C1 و C3 و C4 و C6 كتبادل لمدخلات الطاقة وإزاحة و C5 و C7 أداء وظائف التخزين لمكبرات الهواء الناتج القوي من Class D. Capracitors C8 و C9 الحد من عرض النطاق الترددي لمكبر الصوت إلى 16 هرتز، والفريت الخرز L2 و L3 ضعيف التدخل الكهربائي تفتيشها على الكابلات الطويلة. تصفية P-sceded C1، C2، L1 قمع التدخل في مدخل رقاقة IC1. يمكن تشكيل إشارات الإدخال من Step_a و STEP_S، التحكم، على التوالي، القنوات اليمنى واليسرى للمحرك بواسطة جهاز تحكم مناسب. تحمي السلاسل الداخلية مكبر للصوت من الدوائر القصيرة والتحفز في حالة حدوث خلل لمحرك السائر أو اتصال غير صحيح لاستنتاجاته.

الجدول 1
رسم توضيحي لسلسلة النبضات
يوضح الجدول 1 سلسلة من النبضات step_a و step_b السيطرة على دوران محرك السائر النموذجي في اتجاه واحد عن طريق تزويد مجموعات الإشارات بشكل مستمر من 0 إلى 4. الخطوة 4 إرجاع رمح المحرك إلى موضعه الأصلي، دون إكمال مبيعات 360 درجة. لتغيير اتجاه دوران المحرك، ابدأ في تشكيل مخطط نبض مؤقت من أسفل الجدول ونقله. تناول الطعام جهد منخفض المستوى منطقي إلى مدخلات Shdn من رقاقة (الإخراج 8)، يمكنك تعطيل كلا قنوات مكبر للصوت. تظهر أشكال الإشارات الموجودة في مدخلات ومخرجات الدائرة في الشكل 2.





")

