BUDICÍ SYSTÉMY PRO SYNCHRONNÍ MOTORY ŘADY VTE, VTP
Tyristorové budiče řady VTE, VTP jsou určeny k napájení budicích vinutí synchronních motorů o výkonu až 12500 kW, automaticky řízeným stejnosměrným proudem, při jejich přímém a reaktorovém spouštění, synchronním provozu a v nouzových režimech.
Budiče splňují požadavky GOST 24688-81, GOST 18142.1-82 a lze je použít místo usměrňovačů TV-320, TV-400, TV-600, TVU, VTE-320, TE8-320, V-TPE8, V-TPP8, řada KTES .
Budiče se vyrábějí pro jmenovité proudy 200, 320, 400, 630, 800 a 1000 A, jmenovitá napětí od 24 do 300 V. Budiče pro proudy 200, 320 a 400 A jsou přirozeně chlazené vzduchem a pro proudy 630, 800 a 1000 A - nucený vzduch z vestavěných ventilátorů.
VÝHODY POUŽITÍ
snadno přeprogramovatelné při nastavování struktury automatických řídicích systémů;
stabilizace budícího proudu v manuálním režimu;
regulace napětí statoru;
cos regulace? v uzlu zatížení;
regulace jalového proudu statoru;
dvouvodičová rozhraní pro externí automatizaci a diagnostiku;
automatický testovací režim před zapnutím;
kontrola obvodů přepěťové ochrany;
kontrola provozuschopnosti silových obvodů.
rozsáhlý ochranný systém;
vestavěný diagnostický systém a záznam „stopy nehody“;
jakákoliv orientace objektu na přání zákazníka.
PŘÍSTROJ
Napájení VTE, VTP (dále jen „budič“) lze zajistit z jednoho vstupního napětí ~380 V, 50 Hz. Je také možné napájet ovládání ze samostatného vstupu. Pro ovládání zapínacích a vypínacích obvodů olejových spínačů je určen napěťový vstup = 220 (110) V. Uspořádání a složení reléové spínací části budiče je dáno požadavky konkrétní aplikace.
Usměrňovač budiče je vyroben podle třífázového můstkového zapojení s jedním tyristorem v rameni. Paralelně se zátěží (budicí vinutí synchronního motoru) je přes bezkontaktní spínač na tyristorech připojen rozběhový odpor, určený pro asynchronní spouštění a snižující na přijatelnou hodnotu přepětí, která vznikají ve vinutí rotoru při asynchronních provozních režimech motoru. Spínací tyristory jsou navíc spínány jak z mikroprocesorového řídicího systému v režimu spouštění, tak přímo z přepětí na budícím vinutí.
Mikroprocesorový řídicí systém řídí celý komplex budicího zařízení, od příjmu externích a interních diskrétních a analogových signálů až po vydávání řídicích potenciálových a pulzních signálů, jakož i indikaci všech provozních režimů budiče pomocí vestavěného terminálu dálkového ovládání (PT). .
Před zapnutím budiče do provozního režimu se provede testovací režim, při kterém se kontroluje:
provozuschopnost obvodů přepěťové ochrany rotoru dodáváním napěťových impulsů skutečné velikosti a záznamem aktivace spínacích tyristorů v obou směrech;
provozuschopnost převodníku a externích silových obvodů.
Budiče mají provozní režimy automatické a ruční ovládání budicího proudu. Přepnutí z režimu do režimu se provádí bez vypnutí budiče spínačem nainstalovaným na dveřích měniče. Dále jsou zde instalovány měřicí přístroje (statorový proud, budicí proud, budicí napětí, cos ?) a terminál dálkového ovládání, pomocí kterého lze volit strukturu automatického řídicího systému, měnit parametry regulátorů a nastavení kontrolní a ochranný systém. Stejné postupy lze provádět pomocí PC, pro které byla vyvinuta sada servisního softwaru, který výrazně usnadňuje a urychluje proces nastavení.
V režimu ručního ovládání budič poskytuje:
automatické napájení buzení ve funkci rotorového prokluzu v rozsahu 1-5% s volbou optimální půlvlny rotorového proudu pro přímý nebo reaktorový rozběh synchronního motoru;
nastavení budícího napětí v rozsahu od 0,1 do 2,0 jmenovitého;
omezení budícího napětí na minimum od 0 do 0,5 jmenovitého, budícího proudu na maximum 1,75 jmenovitého;
vynucení budícího napětí s faktorem nejméně 2,0 jmenovitým při jmenovitém napětí napájecí sítě a „zesilovacím“ proudem s jmenovitým faktorem 1,75;
omezení rotorového proudu při přetížení podle časově - proudové charakteristiky;
ochrana proti vnitřním zkratům v měniči, proti vnějším zkratům na stejnosměrné straně;
potlačení pole při normálním a nouzovém vypnutí motoru přepnutím měniče do invertorového režimu;
ochrana synchronního motoru před ztrátou buzení a před prodlouženým rozběhem s dobou provozu až 30 s. V režimu automatického řízení budič kromě výše uvedeného zajišťuje automatickou regulaci budícího proudu na základě napětí statoru, cos ? v uzlu zátěže nebo jalovém proudu statoru.
STRUKTURA LEGENDY 
OBECNÉ INFORMACE O DESIGNU
Konstrukčně je budič proveden ve formě skříně s obousměrnou obsluhou. Na dveřích rozvaděče jsou umístěny ovládací prvky, měřicí přístroje a výstražná světla. Tyristorové chlazení je přirozené nebo nucené (VTE, VTP) vzduchem. Externí propojovací kabely jsou přiváděny otvory ve spodní části skříně, utěsněné zaplombovanými přívody. Pro upevnění kabelů jsou k dispozici držáky. Transformátor výkonového měniče se instaluje samostatně.
Rozměry skříně VTE (VTP) (ŠxVxH) mm. – 800 (1000) x 2000 (2150) x 600.
ZÁKLADNÍ TECHNICKÉ ÚDAJE
Tabulka 1. Základní technické údaje systémů buzení synchronních motorů
| Název parametru | Význam |
| 1. Vstupní napájecí napětí třífázové, V | 380 +10/-15 % |
| 2. Frekvence vstupního napětí, Hz | 50 ± 2 % |
| 3. Poměr zvýšení napětí, oh. E. | 2.0 Un |
| 4. Poměr zvýšení proudu není menší než, p.u. | 1,75 palce |
| 5. Provozní napětí DC, V | 220 (110) +10 /-15 % |
| 6. Účinnost, ne méně | 0,95 |
| 7. Stupeň ochrany | IP21…IP54 (volitelné) |
| 8. Životnost ne kratší než, let | 15 |
| 9. Průměrná doba zotavení ne více než, min. | 40 |
| 10. Imunita proti hluku | splňuje všechny standardní požadavky |
| 11. Metoda tlumení pole | střídač |
EKOLOGICKÉ PŘEDPOKLADY
Tabulka 2. Podmínky prostředí
 Synchronní stroj v obvyklém provedení se skládá ze stacionární části - statoru, v jehož drážkách je umístěno třífázové vinutí, a rotační části - rotoru s elektromagnety, do jehož vinutí je přiváděn stejnosměrný proud pomocí skluzu. kroužky a na ně umístěné kartáče (obr. 1). Stator synchronního stroje se neliší od statoru asynchronního stroje. Jeho rotor je buď vyčnívající pól (s vyčnívajícími póly, obr. 1) nebo nevyčnívající pól (válcový rotor, obr. 2).
Synchronní stroj v obvyklém provedení se skládá ze stacionární části - statoru, v jehož drážkách je umístěno třífázové vinutí, a rotační části - rotoru s elektromagnety, do jehož vinutí je přiváděn stejnosměrný proud pomocí skluzu. kroužky a na ně umístěné kartáče (obr. 1). Stator synchronního stroje se neliší od statoru asynchronního stroje. Jeho rotor je buď vyčnívající pól (s vyčnívajícími póly, obr. 1) nebo nevyčnívající pól (válcový rotor, obr. 2).
 Rýže. 1 Synchronní stroj s výběžky (2 p = 8). Rýže. 2 Nevýrazný pólový synchronní stroj (2 p = 2).
Rýže. 1 Synchronní stroj s výběžky (2 p = 8). Rýže. 2 Nevýrazný pólový synchronní stroj (2 p = 2).
 Podle typu poháněče, který pohání synchronní generátor, se používají tyto názvy: parní turbínový generátor nebo zkráceně turbogenerátor (primární stroj - parní turbína), hydroturbinogenerátor nebo zkráceně hydrogenerátor (primátor - hydraulická turbína) a dieselgenerátor ( hnací stroj – hydraulická turbína).nafta). Turbogenerátory jsou vysokorychlostní stroje bez vyčnívajících pólů, v současnosti vyráběné zpravidla se dvěma póly. Turbogenerátor se spolu s parní turbínou, se kterou je mechanicky spojen, nazývá turbínová jednotka.
Podle typu poháněče, který pohání synchronní generátor, se používají tyto názvy: parní turbínový generátor nebo zkráceně turbogenerátor (primární stroj - parní turbína), hydroturbinogenerátor nebo zkráceně hydrogenerátor (primátor - hydraulická turbína) a dieselgenerátor ( hnací stroj – hydraulická turbína).nafta). Turbogenerátory jsou vysokorychlostní stroje bez vyčnívajících pólů, v současnosti vyráběné zpravidla se dvěma póly. Turbogenerátor se spolu s parní turbínou, se kterou je mechanicky spojen, nazývá turbínová jednotka.

 Hydrogenerátory jsou obvykle nízkorychlostní stroje s vyčnívajícími póly, vyrobené s velkým počtem pólů a svislou hřídelí
Hydrogenerátory jsou obvykle nízkorychlostní stroje s vyčnívajícími póly, vyrobené s velkým počtem pólů a svislou hřídelí
 Dieselové generátory jsou ve většině případů stroje s horizontálním hřídelem. Nízkoenergetické synchronní stroje se někdy vyrábějí se stacionárními elektromagnety umístěnými na statoru a vinutím střídavého proudu umístěným ve štěrbinách rotoru vyrobeného z plechu z elektrooceli; v tomto případě je AC vinutí připojeno k vnějšímu obvodu pomocí sběracích kroužků a kartáčů.
Dieselové generátory jsou ve většině případů stroje s horizontálním hřídelem. Nízkoenergetické synchronní stroje se někdy vyrábějí se stacionárními elektromagnety umístěnými na statoru a vinutím střídavého proudu umístěným ve štěrbinách rotoru vyrobeného z plechu z elektrooceli; v tomto případě je AC vinutí připojeno k vnějšímu obvodu pomocí sběracích kroužků a kartáčů.
 Ta část synchronního stroje, v jejímž vinutí se indukuje elektrická energie. d.s. , se nazývá kotva. Elektromagnety (póly) spolu s jhem, které je uzavírá, tvoří pólový systém; nazývá se induktor. U synchronních strojů běžné konstrukce slouží stator jako kotva a rotor jako pólový systém. Hlavní výhody provedení s otočnými póly jsou v tom, že je možné spolehlivěji izolovat vinutí stacionární kotvy a jednodušeji jej připojit ke střídavé síti bez kluzných kontaktů.
Ta část synchronního stroje, v jejímž vinutí se indukuje elektrická energie. d.s. , se nazývá kotva. Elektromagnety (póly) spolu s jhem, které je uzavírá, tvoří pólový systém; nazývá se induktor. U synchronních strojů běžné konstrukce slouží stator jako kotva a rotor jako pólový systém. Hlavní výhody provedení s otočnými póly jsou v tom, že je možné spolehlivěji izolovat vinutí stacionární kotvy a jednodušeji jej připojit ke střídavé síti bez kluzných kontaktů.
 Uspořádání kluzných kontaktů pro napájení stejnosměrného proudu ve vinutí elektromagnetů, nazývané budicí vinutí, není obtížné, protože výkon dodávaný do tohoto vinutí je malý zlomek [(0,3 - 2)%] jmenovitého výkonu stroje. . Navíc je třeba poznamenat, že u moderních výkonných turbogenerátorů pracujících s rychlostí otáčení 3000 ot./min dosahuje obvodová frekvence rotoru 180 - 185 m/sec; při takové frekvenci by nebylo možné vyrobit rotační kotvu sestavenou z tenkých plechů mechanicky dostatečně pevnou.
Uspořádání kluzných kontaktů pro napájení stejnosměrného proudu ve vinutí elektromagnetů, nazývané budicí vinutí, není obtížné, protože výkon dodávaný do tohoto vinutí je malý zlomek [(0,3 - 2)%] jmenovitého výkonu stroje. . Navíc je třeba poznamenat, že u moderních výkonných turbogenerátorů pracujících s rychlostí otáčení 3000 ot./min dosahuje obvodová frekvence rotoru 180 - 185 m/sec; při takové frekvenci by nebylo možné vyrobit rotační kotvu sestavenou z tenkých plechů mechanicky dostatečně pevnou.
 Rotor moderního turbogenerátoru je vyroben z kvalitního masivního ocelového výkovku. Cívky budícího vinutí jsou umístěny ve štěrbinách vyfrézovaných na vnějším povrchu rotoru a zajištěny ve štěrbinách silnými kovovými klíny. Čelní části budícího vinutí jsou pokryty prstencovými pásy ze zvláště pevné oceli. Synchronní stroj obvykle přijímá proud pro napájení budícího vinutí z malého generátoru stejnosměrného proudu umístěného na společné hřídeli s ním nebo s ním mechanicky připojeného. Takový generátor se nazývá budič. U výkonného turbogenerátoru je hřídel budiče spojen s hřídelí turbogenerátoru pomocí polopružné spojky.
Rotor moderního turbogenerátoru je vyroben z kvalitního masivního ocelového výkovku. Cívky budícího vinutí jsou umístěny ve štěrbinách vyfrézovaných na vnějším povrchu rotoru a zajištěny ve štěrbinách silnými kovovými klíny. Čelní části budícího vinutí jsou pokryty prstencovými pásy ze zvláště pevné oceli. Synchronní stroj obvykle přijímá proud pro napájení budícího vinutí z malého generátoru stejnosměrného proudu umístěného na společné hřídeli s ním nebo s ním mechanicky připojeného. Takový generátor se nazývá budič. U výkonného turbogenerátoru je hřídel budiče spojen s hřídelí turbogenerátoru pomocí polopružné spojky.
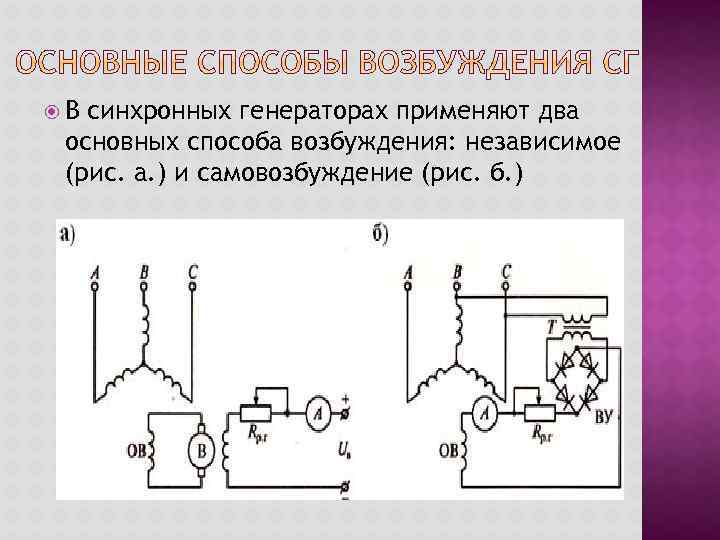 U synchronních generátorů se používají dva hlavní způsoby buzení: nezávislé (obr. a.) a samobuzení (obr. b.)
U synchronních generátorů se používají dva hlavní způsoby buzení: nezávislé (obr. a.) a samobuzení (obr. b.)
 Při nezávislém buzení je budicí vinutí napájeno stejnosměrným generátorem s nezávislým budícím vinutím umístěným na hřídeli rotoru synchronního generátoru a rotujícím s ním (vysoký výkon). Při samobuzení je budicí vinutí napájeno samotným synchronním generátorem přes usměrňovač (nízký a střední výkon).
Při nezávislém buzení je budicí vinutí napájeno stejnosměrným generátorem s nezávislým budícím vinutím umístěným na hřídeli rotoru synchronního generátoru a rotujícím s ním (vysoký výkon). Při samobuzení je budicí vinutí napájeno samotným synchronním generátorem přes usměrňovač (nízký a střední výkon).
 S pomocí primárního pohonu se rotorová induktor otáčí. Magnetické pole se nachází na rotoru a otáčí se s ním, takže rychlost otáčení rotoru je rovna rychlosti otáčení magnetického pole – odtud název synchronní stroj.
S pomocí primárního pohonu se rotorová induktor otáčí. Magnetické pole se nachází na rotoru a otáčí se s ním, takže rychlost otáčení rotoru je rovna rychlosti otáčení magnetického pole – odtud název synchronní stroj.
 Při otáčení rotoru prochází magnetický tok pólů vinutím statoru a indukuje v něm EMF podle zákona elektromagnetické indukce: E = 4,44*f*w*kw*F, kde: f – frekvence střídavého proudu, Hz; w – počet otáček; kw – součinitel vinutí; F – magnetický tok. Frekvence indukovaného EMF (napětí, proud) synchronního generátoru: f =p *n/60, kde: p – počet pólových párů; n – otáčky rotoru, ot./min.
Při otáčení rotoru prochází magnetický tok pólů vinutím statoru a indukuje v něm EMF podle zákona elektromagnetické indukce: E = 4,44*f*w*kw*F, kde: f – frekvence střídavého proudu, Hz; w – počet otáček; kw – součinitel vinutí; F – magnetický tok. Frekvence indukovaného EMF (napětí, proud) synchronního generátoru: f =p *n/60, kde: p – počet pólových párů; n – otáčky rotoru, ot./min.
 Nahrazení v: E = 4, 44*(p*p/60)*w*kw*Ф a určení, že: 4, 44*(p/60)*w*kw – souvisí s konstrukcí stroje a vytváří návrhový faktor: C = 4. 44*(p/60)*w*kw. Potom: E = CE*n*F. Jako každý generátor založený na zákonu elektromagnetické indukce je tedy indukované EMF úměrné magnetickému toku stroje a rychlosti rotoru.
Nahrazení v: E = 4, 44*(p*p/60)*w*kw*Ф a určení, že: 4, 44*(p/60)*w*kw – souvisí s konstrukcí stroje a vytváří návrhový faktor: C = 4. 44*(p/60)*w*kw. Potom: E = CE*n*F. Jako každý generátor založený na zákonu elektromagnetické indukce je tedy indukované EMF úměrné magnetickému toku stroje a rychlosti rotoru.
 Synchronní stroje se také používají jako elektromotory, zejména ve vysoce výkonných instalacích (nad 50 kW)
Synchronní stroje se také používají jako elektromotory, zejména ve vysoce výkonných instalacích (nad 50 kW)
 Pro provoz synchronního stroje v motorovém režimu je statorové vinutí připojeno k třífázové síti a vinutí rotoru je připojeno ke zdroji stejnosměrného proudu. V důsledku interakce točivého magnetického pole stroje se stejnosměrným proudem budícího vinutí vzniká moment M, který jej unáší rychlostí magnetického pole.
Pro provoz synchronního stroje v motorovém režimu je statorové vinutí připojeno k třífázové síti a vinutí rotoru je připojeno ke zdroji stejnosměrného proudu. V důsledku interakce točivého magnetického pole stroje se stejnosměrným proudem budícího vinutí vzniká moment M, který jej unáší rychlostí magnetického pole.
 Pro připojení generátoru k síti je nutné: stejná rotace fáze v síti a generátoru; rovnost síťového napětí a EMF generátoru; rovnost frekvencí EMF generátoru a síťového napětí; zapněte generátor v okamžiku, kdy EMF generátoru v každé fázi směřuje proti síťovému napětí. Nedodržení těchto podmínek vede k tomu, že při zapnutí generátoru vznikají proudy, které mohou být velké a generátor poškodit.
Pro připojení generátoru k síti je nutné: stejná rotace fáze v síti a generátoru; rovnost síťového napětí a EMF generátoru; rovnost frekvencí EMF generátoru a síťového napětí; zapněte generátor v okamžiku, kdy EMF generátoru v každé fázi směřuje proti síťovému napětí. Nedodržení těchto podmínek vede k tomu, že při zapnutí generátoru vznikají proudy, které mohou být velké a generátor poškodit.
Elektropohony se synchronními motory lze na základě podmínek vzniku zátěže rozdělit do tří tříd: elektropohony s konstantní nebo pomalu se měnící zátěží, elektropohony s pulzující zátěží, elektropohony s prudce se měnící zátěží. Hlavní technické charakteristiky synchronních elektrických pohonů v závislosti na typu zatížení jsou uvedeny v tabulce. 6.1.
Jak vyplývá z tabulky. 6.1 je u elektrických pohonů s pulzujícími a ostře proměnnými zátěžemi nutné automaticky řídit buzení synchronního motoru. Automatické systémy řízení buzení zajišťují stabilní provoz synchronního motoru při rázech zátěže nebo při poklesu napájecího napětí. V těchto případech automatické systémy řízení buzení zvyšují budicí proud, čímž zvyšují maximální točivý moment synchronního motoru. Navíc změna budícího proudu synchronního motoru umožňuje regulovat jalový výkon obvodu statoru motoru.
Tabulka 6.1
|
Typy zatížení |
Mechanismy |
Rozsah kapacity |
Automatická regulace budícího proudu |
|
Neměnný |
Fanoušci Dmychadla Kompresory |
Yuch-YOO kW |
Není požadováno |
|
Pulzující |
Čerpací stroje Pístové kompresory |
Nezbytné |
|
|
Ostře variabilní |
Drtiče Válcovny Válcovny Nůžky Pily |
1004-10000 kW |
Nezbytné |
Možnost regulace jalového výkonu v obvodu statoru synchronního motoru změnou jeho budícího proudu znázorňují vektorová schémata na Obr. 6.14.
Rýže. 6.14. Vektorové diagramy synchronního motoru při různých proudech budicího vinutí: a - budicí proud je menší než jmenovitý; b - budicí proud je roven jmenovitému proudu; c - budicí proud je větší než jmenovitý
Vektorový diagram Obr. 6.14, A odpovídá proudu budícího vinutí menšímu než jmenovitému, zatímco vektor statorového proudu / zaostává za vektorem napětí sítě LJ X v úhlu srov. Jalový výkon je činně-indukční. S rostoucím budicím proudem (obr. 6.14 , b) EMF E), indukovaný ve vinutí statoru se zvyšuje a může dosáhnout hodnoty, při které bude statorový proud / ve fázi s napětím (/, to znamená costp = 1. Jalový výkon je nulový. Pokud se proud budícího vinutí dále zvýší, pak vektor statorového proudu / , povede ve fázi vektor napětí 6/, (pracují s vedoucím coscp) a synchronní motor bude ekvivalentní aktivní kapacitní zátěži připojené paralelně k síti (obr. 6.14, PROTI).
Na Obr. 6.15 ukazuje charakteristiky tvaru ^/. Ukazují závislost proudu statoru / synchronního motoru na budícím proudu / při různém zatížení hřídele motoru (M s! S číselnými hodnotami parametrů vám 67-tvarované charakteristiky umožňují správně zvolit budicí proud, aby byl zajištěn požadovaný provozní režim synchronního motoru.
V současné době se v praxi používají automatické systémy řízení buzení. V závislosti na konstrukci obvodu mohou automatické systémy řízení budícího proudu plnit následující hlavní funkce:
- zajistit stabilní provoz synchronního motoru při daných podmínkách zatížení;
- udržovat optimální napětí v uzlu zátěže, ke kterému je připojen synchronní motor;
- zajistit minimální energetické ztráty v synchronním motoru a napájecím systému.

Rýže. 6.15.
Při výběru automatických řídicích obvodů pro budicí proud se řídí následujícími ustanoveními:
- v elektrických pohonech s konstantním zatížením a mírným kolísáním napájecího napětí není zpravidla zajištěna instalace zařízení pro automatické řízení budícího proudu;
- V elektrických pohonech s pulzujícím zatížením nebo rázovým zatížením je nutné instalovat zařízení pro automatickou regulaci budícího proudu. Budicí proud takových motorů je regulován jako funkce aktivního proudu statoru, což umožňuje výrazně zvýšit přetížitelnost motoru a v některých případech snížit jeho instalovaný výkon;
- při provozu synchronního motoru s ostře proměnnou zátěží je nutné instalovat i zařízení pro automatickou regulaci budicího proudu, v tomto případě však musí řídicí systém reagovat nejen na změny zátěže, ale i na otáčky. této změny.
Nejjednodušší schéma automatického řídicího systému pro budicí proud pro elektrické pohony s pulzující zátěží je na Obr. 6.16. Systém umožňuje zajistit buzení synchronního motoru ve všech běžných provozních režimech. Při změně zatížení hřídele motoru se zvyšuje proud / proud statorového vinutí, který
vede ke zvýšení signálu kladné proudové zpětné vazby Uoc[
a v důsledku toho ke zvýšení napětí řízeného usměrňovače a zvýšení budícího proudu synchronního motoru.

Rýže. 6.16.
S přihlédnutím k úměrnosti mezi EMF a magnetickým tokem Ф, a tedy proud / in vinutí pole, lze rovnici (1.71) napsat takto:
Kde do - koeficient úměrnosti mezi tokem Ф a budícím proudem 1a.
Analýza (6.10) ukazuje, že zvýšení budícího proudu způsobí zvýšení maximálního momentu synchronního motoru. Automatická regulace buzení následně vede ke zvýšení dynamické stability synchronního motoru při změně zatížení jeho hřídele a tlumení výkyvu rotoru.
Rovněž je možné udržovat optimální napětí v uzlu zátěže, ke kterému je synchronní motor připojen, pomocí systémů automatického řízení budicího proudu.
Pro zlepšení výkonu rozsáhlé průmyslové sítě je jalový výkon kompenzován instalací synchronních motorů nebo synchronních kompenzátorů. Na Obr. Obrázek 6.17 ukazuje schéma uzlu zátěže, ke kterému jsou připojeny spotřebiče vyrábějící a odebírající jalový výkon.

Rýže. 6.1 7.
Indukční jalový proud / p se rovná součtu jalových proudů P
spotřebičů (transformátory; asynchronní motory; stejnosměrné motory napájené nastavitelnými měniči) a je určena výrazem
Kde / . - jalový proud /té zátěže.
Pro plnou kompenzaci jalového výkonu v síti musí být splněna následující podmínka:
Jalový proud synchronního stroje potřebný ke kompenzaci poklesu síťového napětí:
Kde X str- ekvivalentní fázová reaktance sítě s přihlédnutím ke všem spotřebitelům: 
AU C- pokles síťového napětí;  - fázové napětí sítě;
- fázové napětí sítě;
 - celkový fázový odpor všech spotřebičů elektrické energie, kromě synchronního motoru; p, je elektrická vodivost části obvodu; U, t - síťové napětí; S K s -
- celkový fázový odpor všech spotřebičů elektrické energie, kromě synchronního motoru; p, je elektrická vodivost části obvodu; U, t - síťové napětí; S K s -
zkratové napájení sítě.
Moderní systémy pro automatickou regulaci budicího proudu synchronních motorů, určené ke kompenzaci jalového výkonu, jsou postaveny na principu podřízeného řízení souřadnic a umožňují regulaci tří veličin: budící proud, úbytek napětí na ekvivalentní fázové reaktanci sítě, jalový proud statoru synchronního motoru. Funkční schéma takového systému je na Obr. 6.18.

Rýže. 6.18.
Vnitřní obvod zajišťuje regulaci budícího proudu pomocí regulátoru budícího proudu PTB. Příkazem pro budicí proud synchronního motoru je výstupní signál U pj regulátor
jalový proud PRT. Od tohoto signálu se odečte zpětnovazební napětí pro budicí proud synchronního motoru. Výstupní signál?/PTB regulátoru budícího proudu ovlivňuje regul
UV usměrňovač, měnící budicí proud / v synchronním motoru.
Regulátor jalového proudu je zařazen do druhého obvodu - obvodu řízení jalového proudu já Signály se sčítají na jeho vstupu
negativní zpětná vazba na jalový proud (7 ort a signál pro nastavení jalového proudu - z výstupu regulátoru napětí PH.
Na vstupu regulátoru napětí PH se sečtou signály zpětné vazby záporného napětí U na. Napěťová zpětná vazba je tvořena jalovým proudem a ekvivalentním fázovým odporem sítě: U0H = já X C1. Regulátor napětí je adaptivní, proporcionální, mění zesílení, když napájecí napětí klesne pod (0,8 - 0,85) U H .
Přenosové funkce regulačních smyček a regulátorů proudu jsou získány za následujících základních předpokladů:
Nasycení magnetického obvodu synchronního motoru se nebere v úvahu;
Řízený usměrňovač - aperiodický spoj prvního řádu s přenosovou funkcí
Kde k.sh- zesílení řízeného usměrňovače (tyristorového měniče);  - časová konstanta zpoždění
- časová konstanta zpoždění
tyristorový měnič; t in- počet pulzací napětí tyristorového měniče za dobu napájecího napětí; co e -
úhlová frekvence napájecí sítě je rovna 314,15 s" 1 při frekvenci napájecí sítě / s = 50 Hz, všechny časové konstanty filtru a malá setrvačnost jsou sečteny a nahrazeny jednou časovou konstantou.
Přenos funkcí regulátorů v souladu s modulárním optimem:
Regulátor budícího proudu

Regulátor jalového proudu

Kde T- časová konstanta obvodu řízení budícího proudu; 7j ipp - časová konstanta regulační smyčky jalového proudu; do japonštiny- koeficient přenosu snímače budícího proudu; R B - aktivní odpor budícího vinutí synchronního motoru; k Yarye- koeficient prostupu snímače jalového proudu; do xia- přenosový koeficient synchronního motoru řízeného přes obvod budícího vinutí změnou napětí.
Náhrada vynucovacího spoje 7^ rtv R+1 v čitateli přenosové funkce regulátoru budícího proudu WpTB(p) se provádí uvnitř řídicího objektu - synchronního motoru. V regulační smyčce jalového proudu tedy není žádná časová konstanta, kterou je třeba kompenzovat, proto implementace regulátoru s proporcionálně-integrální charakteristikou umožňuje eliminovat nevýhodu podřízeného řídicího systému.
Použití synchronního motoru s automatickou regulací buzení umožňuje udržovat jalový výkon a napětí v uzlu zátěže na dané úrovni. Úkolem automatického regulátoru buzení generovat jalový výkon je proměnná hodnota, která závisí na parametrech a zatížení napájecí sítě.
Synchronní stroje jsou zařízení s rychlostí rotoru, ve které je vždy rovna nebo násobku podobného ukazatele magnetického pole uvnitř vzduchové mezery, která vzniká proudem procházejícím vinutím kotvy. Provoz tohoto typu stroje je založen na principu elektromagnetické indukce.
Buzení synchronních strojů
Synchronní stroje mohou být buzeny elektromagnetickým působením nebo permanentním magnetem. V případě elektromagnetického buzení se používá speciální generátor stejnosměrného proudu, který napájí vinutí, toto zařízení se pro svou hlavní funkci nazývá budič. Stojí za zmínku, že budicí systém se také dělí na dva typy podle způsobu ovlivnění - přímý a nepřímý. Způsob přímého buzení znamená, že hřídel synchronního stroje je přímo mechanicky spojena s rotorem budiče. Nepřímá metoda předpokládá, že k otáčení rotoru je použit jiný motor, například asynchronní elektrický stroj.
Nejpoužívanější metodou je dnes přímá metoda buzení. V případech, kdy má budicí soustava pracovat s výkonnými synchronními elektrickými stroji, se však používají nezávislé budicí generátory, jejichž vinutí je napájeno proudem z jiného zdroje stejnosměrného proudu, nazývaného subbudič. I přes svou objemnost tento systém umožňuje větší stabilitu v provozu a také jemnější vyladění charakteristik.
Zařízení synchronního stroje
Synchronní elektrický stroj má dvě hlavní součásti: induktor (rotor) a kotvu (stator). Nejoptimálnější a proto dnes rozšířené je schéma, kdy je kotva umístěna na statoru, zatímco induktor je umístěn na rotoru. Předpokladem pro fungování mechanismu je přítomnost vzduchové mezery mezi těmito dvěma částmi. Kotva je v tomto případě nehybná část zařízení (stator). Může sestávat z jednoho nebo několika vinutí v závislosti na požadovaném výkonu magnetického pole, které musí vytvořit. Jádro statoru je obvykle vyrobeno z jednotlivých tenkých plechů elektrooceli.
.jpg)

Induktor v synchronních elektrických strojích je elektromagnet, jehož konce vinutí vedou přímo ke sběracím kroužkům na hřídeli. Během provozu je induktor buzen stejnosměrným proudem, díky čemuž rotor vytváří elektromagnetické pole, které interaguje s magnetickým polem kotvy. Tak je díky stejnosměrnému proudu buzení induktoru dosaženo konstantní frekvence rotace magnetického pole uvnitř synchronního stroje.
Princip činnosti synchronních strojů
Princip činnosti synchronního stroje je založen na interakci dvou typů magnetických polí. Jedno z těchto polí je tvořeno kotvou, zatímco druhé vzniká kolem elektromagnetu buzeného stejnosměrným proudem - induktoru. Bezprostředně po dosažení provozního výkonu se magnetické pole vytvářené statorem a rotující uvnitř vzduchové mezery dostává do záběru s magnetickými poli na pólech induktoru. Aby tedy synchronní stroj dosáhl své provozní rychlosti, je k jeho zrychlení potřeba určitý čas. Poté, co se stroj zrychlí na požadovanou frekvenci, je induktor napájen ze stejnosměrného zdroje.

Při zvažování principu činnosti synchronního generátoru bylo zjištěno, že na rotoru synchronního generátoru je umístěn zdroj MMF (induktor), vytvářející v generátoru magnetické pole. Pomocí hnacího motoru (PD) je rotor generátoru uváděn do rotace se synchronní frekvencí n 1 . V tomto případě se magnetické pole rotoru také otáčí a v záběru s vinutím statoru v něm indukuje EMF.
Synchronní motory se konstrukčně téměř neliší od synchronních generátorů. Skládají se také ze statoru s vinutím a rotoru. Proto bez ohledu na provozní režim potřebuje každý synchronní stroj proces buzení - indukci magnetického pole v něm.
Hlavní způsob buzení synchronních strojů je elektromagnetický buzení, jehož podstatou je, že na pólech rotoru je umístěno budicí vinutí. Při průchodu stejnosměrného proudu tímto vinutím vzniká buzení MMF, které indukuje magnetické pole v magnetickém systému stroje.
Pro napájení budícího vinutí se donedávna používaly speciální nezávislé budicí generátory stejnosměrného proudu, nazývané budiče B (obr. 1.1, a) , jehož budící vinutí (OB) přijímalo stejnosměrný proud z jiného generátoru (paralelní buzení), nazývaného subexciter (SU). Rotor synchronního stroje a kotvy budiče a pomocného budiče jsou umístěny na společné hřídeli a otáčejí se současně. V tomto případě proud vstupuje do budícího vinutí synchronního stroje přes sběrací kroužky a kartáče. K regulaci budícího proudu slouží regulační reostaty, zapojené v budicím obvodu budiče (r 1) a subbudič (r 2).
U synchronních generátorů středního a vysokého výkonu je proces regulace budícího proudu automatizován.
U synchronních generátorů vysokého výkonu – turbogenerátorů – se někdy jako budiče používají generátory střídavého proudu induktorového typu (viz § 23.6). Na výstupu takového generátoru je zapnutý polovodičový usměrňovač.
Rýže. 1.1.
V tomto případě se budicí proud synchronního generátoru upravuje změnou buzení induktorového generátoru.
U synchronních generátorů byl použit bezkontaktní systém elektromagnetického buzení, u kterého synchronní generátor nemá sběrací kroužky na rotoru.
V tomto případě je jako budič použit generátor střídavého proudu (obr. 1.1, 5), ve kterém je na rotoru umístěno vinutí 2, ve kterém je indukováno EMF (vinutí kotvy), a budící vinutí 1 je umístěno na stator. V důsledku toho se vinutí kotvy budiče a budicí vinutí synchronního stroje ukáže jako rotující a jejich elektrické připojení je provedeno přímo, bez sběracích kroužků a kartáčů. Ale protože budič je generátor střídavého proudu a budicí vinutí musí být napájeno stejnosměrným proudem, na výstupu vinutí kotvy budiče se zapne polovodičový měnič 3, namontovaný na hřídeli synchronního stroje a rotující společně s budicí vinutí synchronního stroje a vinutí kotvy budiče. Stejnosměrné napájení budícího vinutí 1 budiče je zajištěno ze subbudiče (SU) - generátoru stejnosměrného proudu.
Absence kluzných kontaktů v budicím obvodu synchronního stroje umožňuje zvýšit jeho provozní spolehlivost a zvýšit účinnost.
U synchronních generátorů včetně hydrogenerátorů (viz § 1.2) se rozšířil princip samobuzení (obr. 1.2, a), kdy se energie střídavého proudu potřebná k buzení odebírá ze statorového vinutí synchronního generátoru a přes step-down transformátor a usměrňovací polovodičový měnič (PP) se přeměňují na energii stejnosměrného proudu. Princip samobuzení je založen na tom, že k počátečnímu buzení generátoru dochází vlivem zbytkového magnetismu magnetického obvodu stroje.

Rýže. 1.2.
Na Obr. 1.2, b je blokové schéma systému automatického samobuzení synchronního generátoru (SG) s usměrňovacím transformátorem (VT) a tyristorovým měničem (TC), přes který protéká střídavý proud elektřina ze statorového obvodu SG, po převod na stejnosměrný proud, je přiváděn do budícího vinutí. Tyristorový měnič je řízen pomocí automatického stimulačního regulátoru AVR, jehož vstup přijímá napěťové signály na výstupu SG (přes napěťový transformátor TN) a zatěžovací proud SG (z proudového transformátoru CT). Obvod obsahuje ochrannou jednotku BZ, která zajišťuje ochranu budícího vinutí a tyristorového měniče TP před přepětím a proudovým přetížením.
U moderních synchronních motorů se k buzení používají tyristorová budicí zařízení, která jsou připojena na střídavou síť a automaticky řídí budicí proud ve všech možných provozních režimech motoru, včetně přechodových. Tento způsob buzení je nejspolehlivější a nejhospodárnější, protože účinnost tyristorových budicích zařízení je vyšší než u generátorů stejnosměrného proudu. Průmysl vyrábí tyristorová budicí zařízení pro různá budicí napětí s přípustnou hodnotou stejnosměrného proudu 320 A.
Nejpoužívanější v moderních řadách synchronních motorů jsou budicí tyristorová zařízení typu TE8-320/48 (budicí napětí 48 V) a TE8-320/75 (budicí napětí 75 V). Výkon vynaložený na buzení se obvykle pohybuje od 0,2 do 5 % čistého výkonu stroje (u výkonných strojů platí nižší hodnota).
U nízkovýkonových synchronních strojů se využívá princip buzení permanentními magnety, kdy jsou permanentní magnety umístěny na rotoru stroje. Tento způsob buzení umožňuje zbavit stroj budícího vinutí. V důsledku toho je konstrukce stroje zjednodušená, ekonomičtější a spolehlivější. Vzhledem k nedostatku materiálů pro výrobu permanentních magnetů s velkou zásobou magnetické energie a složitosti jejich zpracování je však použití buzení permanentními magnety omezeno na stroje s výkonem maximálně pár kilowattů.







