سیستم های تحریک برای موتورهای سنکرون سری VTE، VTP
تحریککنندههای تریستور سری VTE، VTP برای تغذیه سیمپیچهای تحریک موتورهای سنکرون تا توان 12500 کیلووات، با جریان مستقیم کنترل خودکار، در هنگام راهاندازی مستقیم و راکتور، عملکرد سنکرون و در حالتهای اضطراری طراحی شدهاند.
تحریک کننده ها الزامات GOST 24688-81، GOST 18142.1-82 را برآورده می کنند و می توانند به جای یکسو کننده های TV-320، TV-400، TV-600، TVU، VTE-320، TE8-320، V-TPE8، استفاده شوند. V-TPP8، سری KTES.
تحریک کننده ها برای جریان های نامی 200، 320، 400، 630، 800 و 1000 A، ولتاژ نامی از 24 تا 300 ولت تولید می شوند. تحریک کننده ها برای جریان های 200، 320 و 400 A به طور طبیعی با هوا خنک می شوند و برای جریان های 806030 و 1000 A - هوای اجباری از فن های داخلی.
مزایای استفاده
هنگام تنظیم ساختار سیستم های کنترل خودکار به راحتی قابل برنامه ریزی مجدد است.
تثبیت جریان تحریک در حالت دستی؛
تنظیم ولتاژ استاتور؛
مقررات cos در گره بار؛
تنظیم جریان راکتیو استاتور؛
رابط های دو سیم برای اتوماسیون خارجی و تشخیص؛
حالت تست خودکار قبل از روشن شدن؛
بررسی مدارهای حفاظت از نوسانات؛
بررسی قابلیت سرویس مدارهای قدرت
سیستم حفاظتی گسترده؛
سیستم تشخیصی داخلی و ثبت "ردیابی تصادف"؛
هر شی گرایی به درخواست مشتری.
DEVICE
منبع تغذیه VTE، VTP (که از این پس "تحریک کننده" نامیده می شود) می تواند از یک ولتاژ ورودی ~ 380 ولت، 50 هرتز تامین شود. همچنین می توان کنترل ها را از یک ورودی جداگانه تغذیه کرد. برای کنترل مدارهای روشن و خاموش کلیدهای روغن، یک ورودی ولتاژ = 220 (110) ولت ارائه می شود. طرح و ترکیب بخش سوئیچینگ رله تحریک کننده بر اساس الزامات کاربرد خاص تعیین می شود.
یکسو کننده تحریک کننده طبق مدار پل سه فاز با یک تریستور در بازو ساخته شده است. به موازات بار (سیم پیچ تحریک موتور سنکرون)، یک مقاومت راه اندازی از طریق یک سوئیچ بدون تماس روی تریستورها متصل می شود، که برای راه اندازی ناهمزمان طراحی شده است و اضافه ولتاژهایی را که در سیم پیچ روتور در حالت های کار موتور ناهمزمان رخ می دهد تا یک مقدار قابل قبول کاهش می دهد. علاوه بر این، تریستورهای سوئیچ هم از سیستم کنترل ریزپردازنده در حالت راه اندازی و هم مستقیماً از اضافه ولتاژهای روی سیم پیچ تحریک روشن می شوند.
سیستم کنترل ریزپردازنده کل مجموعه تجهیزات محرک را کنترل می کند، از دریافت سیگنال های گسسته و آنالوگ خارجی و داخلی تا صدور سیگنال های پتانسیل کنترل و پالس، و همچنین نشان دادن تمام حالت های عملیات تحریک کننده با استفاده از ترمینال کنترل از راه دور داخلی (PT) .
قبل از روشن کردن محرک به حالت عملکرد، یک حالت تست انجام می شود که در طی آن موارد زیر بررسی می شود:
قابلیت سرویس مدارهای حفاظت از اضافه ولتاژ روتور با تامین پالس های ولتاژ با بزرگی واقعی و ثبت فعال شدن تریستورهای سوئیچ در هر دو جهت.
قابلیت سرویس مبدل و مدارهای قدرت خارجی.
محرک ها دارای حالت های عملیاتی کنترل اتوماتیک و دستی جریان تحریک هستند. تغییر حالت از حالت به حالت بدون خاموش کردن محرک توسط سوئیچ نصب شده روی درب مبدل انجام می شود. ابزارهای اندازه گیری (جریان استاتور، جریان تحریک، ولتاژ تحریک، cos ?) و یک ترمینال کنترل از راه دور نیز در آنجا نصب شده است که با کمک آن می توانید ساختار سیستم کنترل خودکار را انتخاب کنید، پارامترهای تنظیم کننده ها و تنظیمات را تغییر دهید. سیستم کنترل و حفاظت همین رویهها را میتوان با استفاده از رایانه شخصی انجام داد، که برای آن مجموعهای از نرمافزارهای خدماتی ایجاد شده است که به طور قابل توجهی فرآیند راهاندازی را تسهیل و سرعت میبخشد.
در حالت کنترل دستی، تحریک کننده فراهم می کند:
تامین خودکار تحریک در عملکرد لغزش روتور در محدوده 1-5٪ با انتخاب نیمه موج بهینه جریان روتور برای راه اندازی مستقیم یا راکتور یک موتور سنکرون.
تنظیم ولتاژ تحریک در محدوده 0.1 تا 2.0 اسمی؛
محدودیت ولتاژ تحریک به حداقل از 0 تا 0.5 نامی، جریان تحریک به حداکثر 1.75 نامی.
وادار کردن ولتاژ تحریک با ضریب حداقل 2.0 در ولتاژ نامی شبکه تغذیه و جریان "تقویت کننده" با ضریب نامی 1.75.
محدود کردن جریان روتور در هنگام اضافه بار با توجه به مشخصه زمان - جریان.
محافظت در برابر مدارهای کوتاه داخلی در مبدل، در برابر مدارهای کوتاه خارجی در سمت DC؛
سرکوب میدان در هنگام خاموش شدن عادی و اضطراری موتور با تغییر مبدل به حالت اینورتر.
محافظت از موتور سنکرون در برابر از دست دادن تحریک و راه اندازی طولانی مدت با زمان کار تا 30 ثانیه. در حالت کنترل خودکار، محرک علاوه بر موارد فوق، تنظیم خودکار جریان تحریک را بر اساس ولتاژ استاتور، cos ? در گره بار یا جریان راکتیو استاتور.
ساختار افسانه 
اطلاعات کلی در مورد طراحی
از نظر ساختاری اکسایتر به صورت کابینت با سرویس دو طرفه ساخته می شود. کنترل ها، ابزار اندازه گیری و لامپ های هشدار بر روی درب کابینت قرار دارند. خنک کننده تریستور هوای طبیعی یا اجباری (VTE, VTP) است. کابلهای اتصال خارجی از طریق سوراخهایی در پایین کابینت، با سرنخهای مهر و موم شده تامین میشوند. براکت هایی برای ایمن سازی کابل ها در نظر گرفته شده است. ترانسفورماتور مبدل قدرت به طور جداگانه نصب می شود.
ابعاد کابینت VTE (VTP) (WxHxD) میلی متر. – 800 (1000) x 2000 (2150) x 600.
داده های فنی پایه
جدول 1. داده های فنی پایه سیستم های تحریک موتور سنکرون
| نام پارامتر | معنی |
| 1. ولتاژ تغذیه ورودی سه فاز V | 380 +10/-15 % |
| 2. فرکانس ولتاژ ورودی، هرتز | 50 ± 2٪ |
| 3. نسبت افزایش ولتاژ، اوه. ه. | 2.0 Un |
| 4. نسبت تقویت فعلی کمتر از p.u نیست. | 1.75 اینچ |
| 5. ولتاژ کاری DC، V | 220 (110) +10 /-15 % |
| 6. کارایی، نه کمتر | 0,95 |
| 7. درجه حفاظت | IP21…IP54 (اختیاری) |
| 8. عمر سرویس نه کمتر از سال | 15 |
| 9. میانگین زمان بهبودی بیش از، حداقل. | 40 |
| 10. ایمنی در برابر صدا | تمام الزامات استاندارد را برآورده می کند |
| 11. روش میرایی میدانی | معکوس کننده |
شرایط محیطی
جدول 2. شرایط محیطی
 یک ماشین سنکرون در طراحی معمول خود از یک قسمت ثابت - یک استاتور که در شیارهای آن یک سیم پیچ سه فاز قرار می گیرد و یک قسمت دوار - یک روتور با آهنرباهای الکتریکی تشکیل شده است که به سیم پیچ آن جریان مستقیم با استفاده از لغزش وارد می شود. حلقه ها و برس هایی که روی آنها قرار می گیرد (شکل 1). استاتور ماشین سنکرون هیچ تفاوتی با استاتور ماشین ناهمزمان ندارد. روتور آن یا قطب برجسته است (با قطب های برجسته، شکل 1) یا قطب غیر برجسته (روتور استوانه ای، شکل 2).
یک ماشین سنکرون در طراحی معمول خود از یک قسمت ثابت - یک استاتور که در شیارهای آن یک سیم پیچ سه فاز قرار می گیرد و یک قسمت دوار - یک روتور با آهنرباهای الکتریکی تشکیل شده است که به سیم پیچ آن جریان مستقیم با استفاده از لغزش وارد می شود. حلقه ها و برس هایی که روی آنها قرار می گیرد (شکل 1). استاتور ماشین سنکرون هیچ تفاوتی با استاتور ماشین ناهمزمان ندارد. روتور آن یا قطب برجسته است (با قطب های برجسته، شکل 1) یا قطب غیر برجسته (روتور استوانه ای، شکل 2).
 برنج. 1 دستگاه سنکرون قطب برجسته (2 p = 8). برنج. 2 ماشین سنکرون قطب غیر برجسته (2 p = 2).
برنج. 1 دستگاه سنکرون قطب برجسته (2 p = 8). برنج. 2 ماشین سنکرون قطب غیر برجسته (2 p = 2).
 بسته به نوع محرک اولیه ای که ژنراتور سنکرون را به حرکت در می آورد، از نام های زیر استفاده می شود: ژنراتور توربین بخار یا توربوژنراتور به اختصار (محرک اولیه - توربین بخار)، ژنراتور توربین هیدرولیک یا هیدروژنراتور مخفف (پرایم موور - هیدروژنراتور و دی ژنراتور هیدرولیک) موتور اصلی - توربین هیدرولیک).دیزل). توربوژنراتورها ماشین های پرسرعت غیر قطبی هستند که در حال حاضر معمولاً با دو قطب تولید می شوند. یک توربو ژنراتور همراه با توربین بخار که به صورت مکانیکی به آن متصل است، یک واحد توربین نامیده می شود.
بسته به نوع محرک اولیه ای که ژنراتور سنکرون را به حرکت در می آورد، از نام های زیر استفاده می شود: ژنراتور توربین بخار یا توربوژنراتور به اختصار (محرک اولیه - توربین بخار)، ژنراتور توربین هیدرولیک یا هیدروژنراتور مخفف (پرایم موور - هیدروژنراتور و دی ژنراتور هیدرولیک) موتور اصلی - توربین هیدرولیک).دیزل). توربوژنراتورها ماشین های پرسرعت غیر قطبی هستند که در حال حاضر معمولاً با دو قطب تولید می شوند. یک توربو ژنراتور همراه با توربین بخار که به صورت مکانیکی به آن متصل است، یک واحد توربین نامیده می شود.

 هیدروژنراتورها معمولاً ماشینهای قطب برجسته با سرعت کم هستند که با تعداد زیادی قطب و شفت عمودی ساخته میشوند.
هیدروژنراتورها معمولاً ماشینهای قطب برجسته با سرعت کم هستند که با تعداد زیادی قطب و شفت عمودی ساخته میشوند.
 دیزل ژنراتورها در بیشتر موارد ماشین هایی با شفت افقی هستند. ماشینهای سنکرون کممصرف گاهی اوقات با آهنرباهای الکتریکی ثابت روی استاتور و یک سیمپیچ جریان متناوب در شکافهای روتور ساخته شده از ورق فولادی ساخته میشوند. در این حالت سیم پیچ AC از طریق حلقه های لغزنده و برس ها به مدار خارجی متصل می شود.
دیزل ژنراتورها در بیشتر موارد ماشین هایی با شفت افقی هستند. ماشینهای سنکرون کممصرف گاهی اوقات با آهنرباهای الکتریکی ثابت روی استاتور و یک سیمپیچ جریان متناوب در شکافهای روتور ساخته شده از ورق فولادی ساخته میشوند. در این حالت سیم پیچ AC از طریق حلقه های لغزنده و برس ها به مدار خارجی متصل می شود.
 بخشی از ماشین سنکرون که در سیم پیچ آن انرژی الکتریکی القا می شود. d.s. ، لنگر نامیده می شود. الکترومغناطیس ها (قطب ها) همراه با یوغی که آنها را می بندد یک سیستم قطبی را تشکیل می دهند. به آن سلف می گویند. در ماشین های سنکرون با طراحی معمولی، استاتور به عنوان یک آرمیچر و روتور به عنوان یک سیستم قطب عمل می کند. مزایای اصلی طراحی با قطب های دوار این است که می توان عایق مطمئن تری از سیم پیچ آرمیچر ثابت و اتصال ساده تر آن به شبکه جریان متناوب بدون کنتاکت های کشویی را فراهم کرد.
بخشی از ماشین سنکرون که در سیم پیچ آن انرژی الکتریکی القا می شود. d.s. ، لنگر نامیده می شود. الکترومغناطیس ها (قطب ها) همراه با یوغی که آنها را می بندد یک سیستم قطبی را تشکیل می دهند. به آن سلف می گویند. در ماشین های سنکرون با طراحی معمولی، استاتور به عنوان یک آرمیچر و روتور به عنوان یک سیستم قطب عمل می کند. مزایای اصلی طراحی با قطب های دوار این است که می توان عایق مطمئن تری از سیم پیچ آرمیچر ثابت و اتصال ساده تر آن به شبکه جریان متناوب بدون کنتاکت های کشویی را فراهم کرد.
 چیدمان کنتاکت های لغزنده برای تامین جریان مستقیم در سیم پیچ آهنرباهای الکتریکی که سیم پیچ میدان نامیده می شود، دشوار نیست، زیرا توان تامین شده به این سیم پیچ کسری کوچک [(0.3 - 2)٪] از توان نامی دستگاه است. . علاوه بر این، لازم به ذکر است که در توربوژنراتورهای قدرتمند مدرن که با سرعت چرخش 3000 دور در دقیقه کار می کنند، فرکانس محیطی روتور به 180 - 185 متر در ثانیه می رسد. در چنین فرکانسی نمی توان یک آرمیچر چرخشی که از ورقه های نازک مونتاژ شده است از نظر مکانیکی به اندازه کافی قوی ساخت.
چیدمان کنتاکت های لغزنده برای تامین جریان مستقیم در سیم پیچ آهنرباهای الکتریکی که سیم پیچ میدان نامیده می شود، دشوار نیست، زیرا توان تامین شده به این سیم پیچ کسری کوچک [(0.3 - 2)٪] از توان نامی دستگاه است. . علاوه بر این، لازم به ذکر است که در توربوژنراتورهای قدرتمند مدرن که با سرعت چرخش 3000 دور در دقیقه کار می کنند، فرکانس محیطی روتور به 180 - 185 متر در ثانیه می رسد. در چنین فرکانسی نمی توان یک آرمیچر چرخشی که از ورقه های نازک مونتاژ شده است از نظر مکانیکی به اندازه کافی قوی ساخت.
 روتور یک توربوژنراتور مدرن از فورج فولاد جامد با کیفیت بالا ساخته شده است. سیم پیچ های سیم پیچ میدان در شکاف هایی که روی سطح بیرونی روتور آسیاب شده قرار می گیرند و با گوه های فلزی محکم در شکاف ها محکم می شوند. قسمت های جلویی سیم پیچ تحریک با نوارهای حلقه ای ساخته شده از فولاد مخصوصاً قوی پوشانده شده است. یک ماشین سنکرون معمولاً جریانی را برای تغذیه سیم پیچ میدان از یک مولد جریان مستقیم کوچک که روی یک شفت مشترک با آن قرار می گیرد یا به طور مکانیکی به آن متصل می شود دریافت می کند. چنین ژنراتوری تحریک کننده نامیده می شود. در مورد یک توربو ژنراتور قدرتمند، شفت تحریک کننده با استفاده از یک کوپلینگ نیمه الاستیک به شفت توربوژنراتور متصل می شود.
روتور یک توربوژنراتور مدرن از فورج فولاد جامد با کیفیت بالا ساخته شده است. سیم پیچ های سیم پیچ میدان در شکاف هایی که روی سطح بیرونی روتور آسیاب شده قرار می گیرند و با گوه های فلزی محکم در شکاف ها محکم می شوند. قسمت های جلویی سیم پیچ تحریک با نوارهای حلقه ای ساخته شده از فولاد مخصوصاً قوی پوشانده شده است. یک ماشین سنکرون معمولاً جریانی را برای تغذیه سیم پیچ میدان از یک مولد جریان مستقیم کوچک که روی یک شفت مشترک با آن قرار می گیرد یا به طور مکانیکی به آن متصل می شود دریافت می کند. چنین ژنراتوری تحریک کننده نامیده می شود. در مورد یک توربو ژنراتور قدرتمند، شفت تحریک کننده با استفاده از یک کوپلینگ نیمه الاستیک به شفت توربوژنراتور متصل می شود.
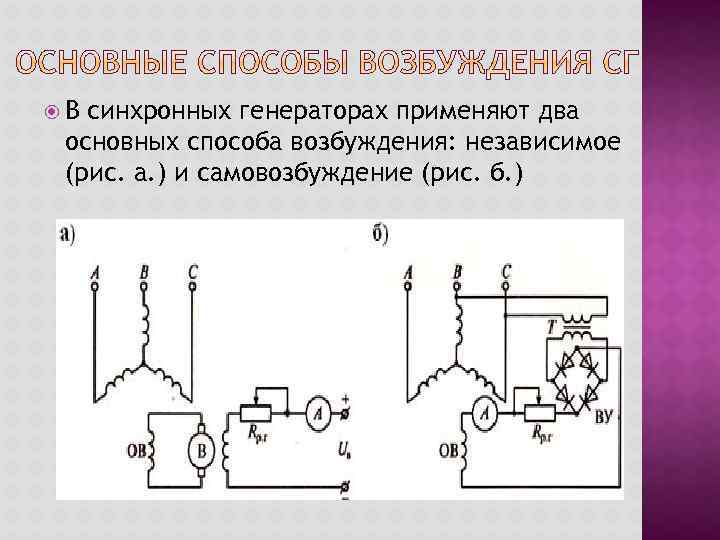 در ژنراتورهای سنکرون از دو روش اصلی تحریک استفاده می شود: مستقل (شکل a.) و خود تحریکی (شکل ب).
در ژنراتورهای سنکرون از دو روش اصلی تحریک استفاده می شود: مستقل (شکل a.) و خود تحریکی (شکل ب).
 با تحریک مستقل، سیم پیچ تحریک توسط یک ژنراتور جریان مستقیم با یک سیم پیچ تحریک مستقل که بر روی شفت روتور یک ژنراتور سنکرون قرار دارد و با آن می چرخد (قدرت بالا) تغذیه می شود. در طول خود تحریکی، سیم پیچ تحریک توسط خود ژنراتور سنکرون از طریق یکسوساز (توان کم و متوسط) تغذیه می شود.
با تحریک مستقل، سیم پیچ تحریک توسط یک ژنراتور جریان مستقیم با یک سیم پیچ تحریک مستقل که بر روی شفت روتور یک ژنراتور سنکرون قرار دارد و با آن می چرخد (قدرت بالا) تغذیه می شود. در طول خود تحریکی، سیم پیچ تحریک توسط خود ژنراتور سنکرون از طریق یکسوساز (توان کم و متوسط) تغذیه می شود.
 با کمک محرک اصلی، سلف روتور می چرخد. میدان مغناطیسی روی روتور قرار دارد و با آن میچرخد، بنابراین سرعت چرخش روتور برابر با سرعت چرخش میدان مغناطیسی است - از این رو ماشین سنکرون نامیده میشود.
با کمک محرک اصلی، سلف روتور می چرخد. میدان مغناطیسی روی روتور قرار دارد و با آن میچرخد، بنابراین سرعت چرخش روتور برابر با سرعت چرخش میدان مغناطیسی است - از این رو ماشین سنکرون نامیده میشود.
 هنگامی که روتور می چرخد، شار مغناطیسی قطب ها از سیم پیچ استاتور عبور می کند و بر اساس قانون القای الکترومغناطیسی EMF را در آن القا می کند: E = 4.44*f*w*kw*F، که در آن: f – فرکانس جریان متناوب، هرتز w - تعداد چرخش. کیلو وات - ضریب سیم پیچ؛ F - شار مغناطیسی. فرکانس EMF القایی (ولتاژ، جریان) یک ژنراتور سنکرون: f =p *n/60، که در آن: p - تعداد جفتهای قطب. n – سرعت چرخش روتور، دور در دقیقه.
هنگامی که روتور می چرخد، شار مغناطیسی قطب ها از سیم پیچ استاتور عبور می کند و بر اساس قانون القای الکترومغناطیسی EMF را در آن القا می کند: E = 4.44*f*w*kw*F، که در آن: f – فرکانس جریان متناوب، هرتز w - تعداد چرخش. کیلو وات - ضریب سیم پیچ؛ F - شار مغناطیسی. فرکانس EMF القایی (ولتاژ، جریان) یک ژنراتور سنکرون: f =p *n/60، که در آن: p - تعداد جفتهای قطب. n – سرعت چرخش روتور، دور در دقیقه.
 جایگزینی در: E = 4، 44*(p*p/60)*w*kw*Ф و با تعیین اینکه: 4، 44*(p/60)*w*kw – مربوط به طراحی ماشین است و ایجاد می کند ضریب طراحی: C = 4. 44*(p/60)*w*kw. سپس: E = CE*n*F. بنابراین، مانند هر ژنراتوری بر اساس قانون القای الکترومغناطیسی، EMF القایی متناسب با شار مغناطیسی دستگاه و سرعت روتور است.
جایگزینی در: E = 4، 44*(p*p/60)*w*kw*Ф و با تعیین اینکه: 4، 44*(p/60)*w*kw – مربوط به طراحی ماشین است و ایجاد می کند ضریب طراحی: C = 4. 44*(p/60)*w*kw. سپس: E = CE*n*F. بنابراین، مانند هر ژنراتوری بر اساس قانون القای الکترومغناطیسی، EMF القایی متناسب با شار مغناطیسی دستگاه و سرعت روتور است.
 ماشینهای سنکرون بهعنوان موتور الکتریکی بهویژه در تاسیسات پرقدرت (بیش از 50 کیلو وات) استفاده میشوند.
ماشینهای سنکرون بهعنوان موتور الکتریکی بهویژه در تاسیسات پرقدرت (بیش از 50 کیلو وات) استفاده میشوند.
 برای کارکرد ماشین سنکرون در حالت موتور، سیم پیچ استاتور به یک شبکه سه فاز و سیم پیچ روتور به منبع جریان مستقیم متصل می شود. در نتیجه برهمکنش میدان مغناطیسی دوار ماشین با جریان مستقیم سیم پیچ میدان، گشتاور M بوجود می آید که با سرعت میدان مغناطیسی آن را دور می کند.
برای کارکرد ماشین سنکرون در حالت موتور، سیم پیچ استاتور به یک شبکه سه فاز و سیم پیچ روتور به منبع جریان مستقیم متصل می شود. در نتیجه برهمکنش میدان مغناطیسی دوار ماشین با جریان مستقیم سیم پیچ میدان، گشتاور M بوجود می آید که با سرعت میدان مغناطیسی آن را دور می کند.
 برای اتصال ژنراتور به شبکه لازم است: چرخش فاز یکسان در شبکه و ژنراتور؛ برابری ولتاژ شبکه و EMF ژنراتور؛ برابری فرکانس های EMF ژنراتور و ولتاژ شبکه؛ در لحظه ای که EMF ژنراتور در هر فاز مخالف ولتاژ شبکه است، ژنراتور را روشن کنید. عدم رعایت این شرایط منجر به این واقعیت می شود که وقتی ژنراتور روشن می شود، جریان هایی ایجاد می شود که می تواند زیاد باشد و به ژنراتور آسیب برساند.
برای اتصال ژنراتور به شبکه لازم است: چرخش فاز یکسان در شبکه و ژنراتور؛ برابری ولتاژ شبکه و EMF ژنراتور؛ برابری فرکانس های EMF ژنراتور و ولتاژ شبکه؛ در لحظه ای که EMF ژنراتور در هر فاز مخالف ولتاژ شبکه است، ژنراتور را روشن کنید. عدم رعایت این شرایط منجر به این واقعیت می شود که وقتی ژنراتور روشن می شود، جریان هایی ایجاد می شود که می تواند زیاد باشد و به ژنراتور آسیب برساند.
درایوهای الکتریکی با موتورهای سنکرون را می توان بر اساس شرایط تشکیل بار به سه دسته تقسیم کرد: درایوهای الکتریکی با بار ثابت یا آهسته در حال تغییر، درایوهای الکتریکی با بار ضربانی، درایوهای الکتریکی با بار در حال تغییر شدید. مشخصات فنی اصلی درایوهای الکتریکی سنکرون، بسته به نوع بار مواجه شده، در جدول آورده شده است. 6.1.
به شرح زیر از جدول. 6.1، در درایوهای الکتریکی با بارهای ضربانی و به شدت متغیر، کنترل خودکار تحریک یک موتور سنکرون ضروری است. سیستم های کنترل تحریک خودکار عملکرد پایدار یک موتور سنکرون را در هنگام نوسانات بار یا زمانی که ولتاژ شبکه تغذیه کاهش می یابد تضمین می کند. در این موارد، سیستم های کنترل تحریک خودکار جریان تحریک را افزایش می دهند و در نتیجه حداکثر گشتاور موتور سنکرون را افزایش می دهند. علاوه بر این، تغییر جریان تحریک یک موتور سنکرون به شما امکان می دهد توان راکتیو مدار استاتور موتور را تنظیم کنید.
جدول 6.1
|
انواع بار |
مکانیسم ها |
دامنه ظرفیت ها |
تنظیم خودکار جریان تحریک |
|
غیر قابل تغییر |
طرفداران دمنده ها کمپرسورها |
Yuch-YOO کیلو وات |
لازم نیست |
|
ضربان دار |
ماشین آلات پمپاژ کمپرسورهای پیستونی |
ضروری است |
|
|
به شدت متغیر |
سنگ شکن آسیاب نورد اره قیچی |
1004-10000 کیلو وات |
ضروری است |
امکان تنظیم توان راکتیو در مدار استاتور یک موتور سنکرون با تغییر جریان تحریک آن توسط نمودارهای برداری نشان داده شده در شکل نشان داده شده است. 6.14.
برنج. 6.14. نمودارهای برداری یک موتور سنکرون در جریان های سیم پیچ میدانی مختلف: الف - جریان تحریک کمتر از نامی است. ب - جریان تحریک برابر با جریان نامی است. ج - جریان تحریک بیشتر از نامی باشد
نمودار برداری شکل. 6.14، آمربوط به جریان سیم پیچ تحریک کمتر از نامی است، در حالی که بردار جریان استاتور / از بردار ولتاژ شبکه عقب است. LJ Xدر زاویه ر.ک. توان راکتیو فعال-القایی است. با افزایش جریان تحریک (شکل 6.14 ، ب) EMF E)القا شده در سیمپیچهای استاتور افزایش مییابد و میتواند به مقداری برسد که در آن جریان / استاتور با ولتاژ (/، یعنی costp = 1) در فاز باشد. توان راکتیو صفر است. اگر جریان سیمپیچ میدان بیشتر افزایش یابد، آنگاه بردار جریان استاتور / ، بردار ولتاژ 6/ را در فاز هدایت می کند (کار با coscp پیشرو) و موتور سنکرون معادل یک بار خازنی فعال متصل به موازات شبکه خواهد بود (شکل 6.14، V).
در شکل 6.15 ویژگی های ^/-شکل را نشان می دهد. آنها وابستگی جریان استاتور / موتور سنکرون به جریان تحریک / در بارهای مختلف روی شفت موتور را نشان می دهند (M s! با مقادیر عددی پارامترها، ویژگی های 67 شکل به شما امکان می دهد جریان تحریک را به درستی انتخاب کنید تا از حالت کار مورد نیاز موتور سنکرون اطمینان حاصل کنید.
در حال حاضر از سیستم های کنترل خودکار تحریک در عمل استفاده می شود. بسته به طراحی مدار، سیستم های کنترل جریان تحریک خودکار می توانند عملکردهای اصلی زیر را انجام دهند:
- اطمینان از عملکرد پایدار یک موتور سنکرون تحت شرایط بار معین.
- حفظ ولتاژ بهینه در گره بار که موتور سنکرون به آن متصل است.
- اطمینان از حداقل تلفات انرژی در موتور سنکرون و سیستم منبع تغذیه.

برنج. 6.15.
هنگام انتخاب مدارهای کنترل خودکار برای جریان تحریک، آنها با مقررات زیر هدایت می شوند:
- در درایوهای الکتریکی با بار ثابت و نوسانات جزئی در ولتاژ تغذیه، نصب دستگاه هایی برای کنترل خودکار جریان تحریک، به طور معمول، ارائه نمی شود.
- در درایوهای الکتریکی با بار ضربانی یا بار ضربه ای، نصب دستگاه هایی برای کنترل خودکار جریان تحریک ضروری است. جریان تحریک چنین موتورهایی به عنوان تابعی از جریان فعال استاتور تنظیم می شود که باعث می شود ظرفیت اضافه بار موتور به میزان قابل توجهی افزایش یابد و در برخی موارد قدرت نصب شده آن کاهش یابد.
- هنگام کار با موتور سنکرون با بار بسیار متغیر، همچنین لازم است دستگاه هایی برای تنظیم خودکار جریان تحریک نصب شود، اما در این حالت، سیستم کنترل باید نه تنها به تغییرات بار، بلکه به سرعت نیز پاسخ دهد. از این تغییر
ساده ترین نمودار یک سیستم کنترل خودکار برای جریان تحریک برای درایوهای الکتریکی با بار ضربانی در شکل 1 نشان داده شده است. 6.16. این سیستم امکان تحریک یک موتور سنکرون را در تمام حالت های عملکرد عادی فراهم می کند. هنگامی که بار روی شفت موتور تغییر می کند، جریان سیم پیچ استاتور / افزایش می یابد، که
منجر به افزایش سیگنال بازخورد جریان مثبت می شود Uoc[
و در نتیجه افزایش ولتاژ یکسو کننده کنترل شده و افزایش جریان تحریک موتور سنکرون.

برنج. 6.16.
با در نظر گرفتن تناسب بین EMF و شار مغناطیسی Ф و بنابراین جریان سیم پیچ میدان / در، معادله (1.71) را می توان به صورت زیر نوشت:
جایی که به -ضریب تناسب بین شار Ф و جریان تحریک 1 a.
تجزیه و تحلیل (6.10) نشان می دهد که افزایش در جریان تحریک باعث افزایش حداکثر گشتاور یک موتور سنکرون می شود. در نتیجه، کنترل خودکار تحریک منجر به افزایش پایداری دینامیکی یک موتور سنکرون در هنگام تغییر بار روی شفت و میرایی نوسان روتور میشود.
همچنین حفظ ولتاژ بهینه در گره باری که موتور سنکرون به آن متصل است با استفاده از سیستم های کنترل جریان تحریک خودکار امکان پذیر است.
برای بهبود عملکرد یک شبکه صنعتی گسترده، توان راکتیو با نصب موتورهای سنکرون یا جبران کننده های سنکرون جبران می شود. در شکل شکل 6.17 نمودار یک گره بار را نشان می دهد که مصرف کنندگان تولید کننده و مصرف کننده توان راکتیو به آن متصل هستند.

برنج. 6.1 7.
جریان راکتیو القایی / p برابر است با مجموع جریان های راکتیو پ
مصرف کنندگان (ترانسفورماتورها، موتورهای ناهمزمان، موتورهای DC که توسط مبدل های قابل تنظیم تغذیه می شوند) و با عبارت تعیین می شود
جایی که / . - جریان راکتیو بار /ام.
برای جبران کامل توان راکتیو در شبکه، شرایط زیر باید رعایت شود:
جریان راکتیو یک ماشین سنکرون مورد نیاز برای جبران افت ولتاژ شبکه:
جایی که X p- راکتانس فاز معادل شبکه با در نظر گرفتن تمام مصرف کنندگان: 
AU C- افت ولتاژ شبکه؛  - ولتاژ فاز شبکه؛
- ولتاژ فاز شبکه؛
 - مقاومت فاز کل تمام مصرف کنندگان انرژی الکتریکی، به جز موتور سنکرون. p، هدایت الکتریکی بخش مدار است. U، t -ولتاژ خط؛ اس کبا -
- مقاومت فاز کل تمام مصرف کنندگان انرژی الکتریکی، به جز موتور سنکرون. p، هدایت الکتریکی بخش مدار است. U، t -ولتاژ خط؛ اس کبا -
برق اتصال کوتاه شبکه
سیستم های مدرن برای کنترل خودکار جریان تحریک موتورهای سنکرون، که برای جبران توان راکتیو طراحی شده اند، بر اساس اصل کنترل فرعی مختصات ساخته شده اند و تنظیم سه متغیر را فراهم می کنند: جریان تحریک، افت ولتاژ در راکتانس فاز معادل. شبکه، جریان راکتیو استاتور موتور سنکرون. نمودار عملکردی چنین سیستمی در شکل نشان داده شده است. 6.18.

برنج. 6.18.
مدار داخلی تنظیم جریان تحریک را با استفاده از تنظیم کننده جریان تحریک PTB فراهم می کند. فرمان جریان تحریک موتور سنکرون سیگنال خروجی است U pjتنظیم کننده
جریان راکتیو PRT ولتاژ فیدبک برای جریان تحریک موتور سنکرون از این سیگنال کم می شود. سیگنال خروجی؟/PTB تنظیم کننده جریان تحریک روی کنترل شده تأثیر می گذارد
یکسو کننده UV، تغییر جریان تحریک / در یک موتور سنکرون.
تنظیم کننده جریان راکتیو در مدار دوم - مدار کنترل جریان راکتیو - گنجانده شده است من.سیگنال ها در ورودی آن جمع می شوند
بازخورد منفی در جریان راکتیو (7 اورت و سیگنال تنظیم جریان راکتیو - از خروجی تنظیم کننده ولتاژ PH.
در ورودی تنظیم کننده ولتاژ PH، سیگنال های بازخورد ولتاژ منفی جمع می شوند. Uبر. بازخورد ولتاژ از جریان راکتیو و مقاومت فاز معادل شبکه تشکیل می شود: U0H = من ایکس C1. رگولاتور ولتاژ از نوع تطبیقی و متناسب است که با کاهش ولتاژ تغذیه به زیر (0.8 - 0.85) بهره را تغییر می دهد. یو اچ
توابع انتقال حلقه های کنترل و تنظیم کننده های جریان تحت مفروضات اساسی زیر بدست می آیند:
اشباع مدار مغناطیسی یک موتور سنکرون در نظر گرفته نمی شود.
یکسو کننده کنترل شده - پیوند دوره ای مرتبه اول با تابع انتقال
جایی که ک.ش- بهره یکسو کننده کنترل شده (مبدل تریستور)؛  - ثابت زمان تاخیر
- ثابت زمان تاخیر
مبدل تریستور؛ تی در- تعداد ضربان های ولتاژ مبدل تریستور در طول دوره ولتاژ تغذیه. co e -
فرکانس زاویه ای شبکه تامین برابر با 314.15 ثانیه اینچ است، در فرکانس شبکه تامین / s = 50 هرتز؛ تمام ثابت های زمانی فیلتر و اینرسی کوچک جمع شده و با یک ثابت زمانی جایگزین می شوند.
عملکردهای انتقال رگولاتورها مطابق با بهینه مدولار:
تنظیم کننده جریان تحریک

تنظیم کننده جریان راکتیو

جایی که تی- ثابت زمانی مدار کنترل جریان تحریک؛ 7j ipp - ثابت زمانی حلقه کنترل جریان راکتیو. به ژاپنی- ضریب انتقال سنسور جریان تحریک؛ R B -مقاومت فعال سیم پیچ تحریک موتور سنکرون؛ به یاریا- ضریب انتقال سنسور جریان راکتیو؛ به شیا- ضریب انتقال یک موتور سنکرون که از طریق مدار سیم پیچ تحریک با تغییر ولتاژ کنترل می شود.
جبران لینک اجباری 7^ rtv آر+1 در شمارش تابع انتقال تنظیم کننده جریان تحریک WpTB(p)در داخل شی کنترل - یک موتور سنکرون انجام می شود. بنابراین، در حلقه کنترل جریان راکتیو هیچ ثابت زمانی وجود ندارد که نیاز به جبران داشته باشد، بنابراین، پیاده سازی یک کنترل کننده با یک مشخصه انتگرال تناسبی، رفع نقص سیستم کنترل فرعی را ممکن می سازد.
استفاده از یک موتور سنکرون با کنترل تحریک خودکار، حفظ توان راکتیو و ولتاژ در گره بار را در یک سطح معین ممکن می سازد. وظیفه تنظیم کننده تحریک خودکار برای تولید توان راکتیو یک مقدار متغیر است که به پارامترها و بار شبکه تغذیه بستگی دارد.
ماشینهای سنکرون دستگاههایی با سرعت روتور هستند که در آنها همیشه برابر یا مضربی از یک نشانگر مشابه میدان مغناطیسی داخل شکاف هوا است که توسط جریان عبوری از سیمپیچ آرمیچر ایجاد میشود. عملکرد این نوع ماشین ها بر اساس اصل القای الکترومغناطیسی است.
تحریک ماشین های سنکرون
ماشین های سنکرون می توانند با عمل الکترومغناطیسی یا آهنربای دائمی تحریک شوند. در مورد تحریک الکترومغناطیسی، از یک مولد جریان مستقیم ویژه استفاده می شود که سیم پیچ را تغذیه می کند؛ این دستگاه به دلیل عملکرد اصلی آن، تحریک کننده نامیده می شود. شایان ذکر است که سیستم تحریک نیز با توجه به روش نفوذ به دو نوع تقسیم می شود - مستقیم و غیر مستقیم. روش تحریک مستقیم به این معنی است که شفت ماشین سنکرون مستقیماً به صورت مکانیکی به روتور محرک متصل است. روش غیرمستقیم فرض می کند که برای چرخاندن روتور، از موتور دیگری استفاده می شود، به عنوان مثال یک ماشین الکتریکی ناهمزمان.
پرکاربردترین روش امروزه روش مستقیم تحریک است. اما در مواردی که قرار است سیستم تحریک با ماشینهای الکتریکی سنکرون قدرتمند کار کند، از ژنراتورهای تحریک مستقل استفاده میشود که سیمپیچهای آنها با جریان از منبع جریان مستقیم دیگری به نام ساب محرک تامین میشوند. علیرغم حجیم بودن، این سیستم باعث پایداری بیشتر در کار و همچنین تنظیم دقیق ویژگی ها می شود.
دستگاه یک ماشین سنکرون
یک ماشین الکتریکی سنکرون دارای دو جزء اصلی است: یک سلف (روتور) و یک آرمیچر (استاتور). بهینه ترین و در نتیجه گسترده ترین امروزه طرحی است که آرمیچر روی استاتور قرار می گیرد، در حالی که سلف روی روتور قرار دارد. یک پیش نیاز برای عملکرد مکانیسم وجود شکاف هوا بین این دو قسمت است. آرمیچر در این حالت جزء ثابت دستگاه (استاتور) است. بسته به توان مورد نیاز میدان مغناطیسی که باید ایجاد کند، می تواند از یک یا چند سیم پیچ تشکیل شود. هسته استاتور معمولا از ورق های نازک منفرد فولاد الکتریکی ساخته می شود.
.jpg)

سلف در ماشین های الکتریکی سنکرون یک آهنربای الکتریکی است که انتهای سیم پیچ آن مستقیماً به حلقه های لغزش روی شفت منتهی می شود. در حین کار، سلف توسط جریان مستقیم تحریک می شود، به همین دلیل روتور یک میدان الکترومغناطیسی ایجاد می کند که با میدان مغناطیسی آرمیچر در تعامل است. بنابراین، به لطف جریان مستقیم تحریک کننده سلف، یک فرکانس ثابت چرخش میدان مغناطیسی در داخل ماشین سنکرون به دست می آید.
اصل عملکرد ماشین های سنکرون
اصل عملکرد یک ماشین سنکرون مبتنی بر تعامل دو نوع میدان مغناطیسی است. یکی از این میدان ها توسط آرمیچر تشکیل می شود، در حالی که دیگری در اطراف یک آهنربای الکتریکی برانگیخته شده توسط جریان مستقیم - یک سلف ایجاد می شود. بلافاصله پس از رسیدن به توان عملیاتی، میدان مغناطیسی ایجاد شده توسط استاتور و چرخش در داخل شکاف هوا با میدان های مغناطیسی در قطب های سلف شبکه می شود. بنابراین، برای اینکه یک ماشین سنکرون به سرعت کار خود برسد، مدت زمان معینی برای شتاب دادن به آن لازم است. پس از شتاب گیری دستگاه به فرکانس مورد نیاز، برق از منبع DC به سلف تامین می شود.

هنگام در نظر گرفتن اصل عملکرد یک ژنراتور سنکرون، مشخص شد که یک منبع MMF (سلف) روی روتور ژنراتور سنکرون قرار دارد و یک میدان مغناطیسی در ژنراتور ایجاد می کند. با کمک یک موتور محرک (PD)، روتور ژنراتور با فرکانس سنکرون n 1 به چرخش هدایت می شود. . در این حالت، میدان مغناطیسی روتور نیز می چرخد و با درگیر شدن با سیم پیچ استاتور، EMF را در آن القا می کند.
موتورهای سنکرون از نظر ساختاری تقریباً هیچ تفاوتی با ژنراتورهای سنکرون ندارند. آنها همچنین از یک استاتور با سیم پیچ و یک روتور تشکیل شده اند. بنابراین، صرف نظر از حالت کار، هر ماشین سنکرون نیاز به یک فرآیند تحریک - القای میدان مغناطیسی در آن دارد.
روش اصلی ماشین های سنکرون هیجان انگیز الکترومغناطیسی است تحریک، ماهیت آن این است که یک سیم پیچ تحریک در قطب های روتور قرار می گیرد. هنگامی که یک جریان مستقیم از این سیم پیچ عبور می کند، یک MMF تحریک ایجاد می شود که باعث ایجاد میدان مغناطیسی در سیستم مغناطیسی دستگاه می شود.
تا همین اواخر، مولدهای جریان مستقیم تحریک مستقل ویژه، به نام محرک B، برای تغذیه سیم پیچ تحریک استفاده می شد (شکل 1.1، a). , سیمپیچ تحریکی که (OB) توان DC را از یک ژنراتور دیگر (تحریک موازی) دریافت میکند که زیر تحریک کننده (SU) نامیده میشود. روتور یک ماشین سنکرون و آرمیچرهای محرک و فرعی بر روی یک محور مشترک قرار دارند و به طور همزمان می چرخند. در این حالت جریان از طریق حلقه های لغزنده و برس ها وارد سیم پیچ تحریکی ماشین سنکرون می شود. برای تنظیم جریان تحریک، از رئوستات های کنترلی استفاده می شود که در مدار تحریک تحریک کننده (r 1) وصل شده اند. و subexciter (r 2).
در ژنراتورهای سنکرون توان متوسط و بالا، فرآیند تنظیم جریان تحریک خودکار است.
در ژنراتورهای سنکرون پرقدرت - توربوژنراتورها - گاهی اوقات از ژنراتورهای جریان متناوب از نوع سلف به عنوان تحریک کننده استفاده می شود (بند 23.6 را ببینید). در خروجی چنین ژنراتوری، یکسو کننده نیمه هادی روشن می شود.
برنج. 1.1.
در این حالت، جریان تحریک ژنراتور سنکرون با تغییر تحریک ژنراتور سلف تنظیم می شود.
یک سیستم تحریک الکترومغناطیسی بدون تماس در ژنراتورهای سنکرون استفاده شده است که در آن ژنراتور سنکرون حلقه های لغزشی روی روتور ندارد.
در این مورد، یک ژنراتور جریان متناوب به عنوان یک تحریک کننده استفاده می شود (شکل 1.1، 5)، که در آن سیم پیچ 2، که در آن EMF القا شده است (سیم پیچ آرمیچر)، روی روتور قرار دارد، و سیم پیچ تحریک 1 روی روتور قرار دارد. استاتور در نتیجه، سیمپیچ آرمیچر تحریککننده و سیمپیچ تحریک دستگاه سنکرون چرخان هستند و اتصال الکتریکی آنها مستقیماً بدون حلقههای لغزنده و برس انجام میشود. اما از آنجایی که تحریک کننده یک مولد جریان متناوب است و سیم پیچ تحریک باید با جریان مستقیم تغذیه شود، در خروجی سیم پیچ آرمیچر محرک یک مبدل نیمه هادی 3 روشن می شود که روی شفت ماشین سنکرون نصب شده و همراه با چرخش می چرخد. سیم پیچ تحریک ماشین سنکرون و سیم پیچ آرمیچر تحریک کننده. منبع تغذیه DC سیم پیچ تحریک 1 محرک از زیر محرک (SU) - یک ژنراتور جریان مستقیم ارائه می شود.
عدم وجود کنتاکت های لغزنده در مدار تحریک یک ماشین سنکرون باعث افزایش قابلیت اطمینان عملیاتی و افزایش کارایی آن می شود.
در ژنراتورهای سنکرون، از جمله هیدروژنراتورها (نگاه کنید به § 1.2)، اصل خود تحریکی گسترده شده است (شکل 1.2، a)، زمانی که انرژی جریان متناوب مورد نیاز برای تحریک از سیم پیچ استاتور ژنراتور سنکرون گرفته می شود و از طریق یک ترانسفورماتور کاهنده و مبدل نیمه هادی یکسو کننده (PP) به انرژی جریان مستقیم تبدیل می شود. اصل خود تحریکی بر این واقعیت استوار است که تحریک اولیه ژنراتور به دلیل مغناطیس باقیمانده مدار مغناطیسی دستگاه اتفاق می افتد.

برنج. 1.2.
در شکل 1.2، b یک نمودار بلوکی از یک سیستم خود تحریک خودکار یک ژنراتور سنکرون (SG) با یک ترانسفورماتور یکسو کننده (VT) و یک مبدل تریستور (TC) را نشان می دهد، که از طریق آن جریان الکتریکی متناوب از مدار استاتور SG، پس از تبدیل به جریان مستقیم، به سیم پیچ تحریک عرضه می شود. مبدل تریستور با استفاده از یک تنظیم کننده تحریک خودکار AVR کنترل می شود که ورودی آن سیگنال های ولتاژ را در خروجی SG (از طریق ترانسفورماتور ولتاژ TN) و جریان بار SG (از ترانسفورماتور جریان CT) دریافت می کند. مدار شامل یک واحد حفاظتی BZ است که از سیم پیچ تحریک و مبدل تریستور TP در برابر اضافه ولتاژ و جریان محافظت می کند.
در موتورهای سنکرون مدرن، از دستگاه های مهیج تریستور برای تحریک استفاده می شود؛ آنها به شبکه جریان متناوب متصل می شوند و به طور خودکار جریان تحریک را در تمام حالت های ممکن عملکرد موتور، از جمله حالت های گذرا، کنترل می کنند. این روش تحریک قابل اطمینان ترین و مقرون به صرفه ترین است، زیرا راندمان دستگاه های تحریک کننده تریستور بالاتر از ژنراتورهای جریان مستقیم است. این صنعت دستگاه های تحریک کننده تریستور را برای ولتاژهای تحریک مختلف با مقدار جریان مستقیم مجاز 320 A تولید می کند.
پرکاربردترین موتورهای سنکرون سری مدرن، دستگاه های تریستور تحریک کننده از انواع TE8-320/48 (ولتاژ تحریک 48 ولت) و TE8-320/75 (ولتاژ تحریک 75 ولت) هستند. توان صرف شده برای تحریک معمولاً از 0.2 تا 5 درصد از توان خالص دستگاه متغیر است (مقدار کمتری برای ماشین های پرقدرت اعمال می شود).
در ماشین های سنکرون کم توان، از اصل تحریک توسط آهنرباهای دائمی استفاده می شود، زمانی که آهنرباهای دائمی روی روتور دستگاه قرار دارند. این روش تحریک باعث می شود که دستگاه از سیم پیچ تحریک خلاص شود. در نتیجه، طراحی دستگاه ساده تر، مقرون به صرفه تر و قابل اعتمادتر است. با این حال، با توجه به کمبود مواد برای ساخت آهنرباهای دائمی با منبع زیادی از انرژی مغناطیسی و پیچیدگی پردازش آنها، استفاده از تحریک توسط آهنرباهای دائمی به ماشین هایی با قدرت بیش از چند کیلووات محدود می شود.







