Podczas stosowania starych dysków HDD w celach stosowanych, czasami występuje problem z faktem, że silnik wrzeciona zatrzymuje się po chwili po uruchomieniu. Mają taki "chip" - jeśli nie ma sygnałów z bloku głowy do mikro-sterownika, to zabrania mikroukładu obrócić silnik. Na przykład wiele modeli napędowych spróbujemy dowiedzieć się, jak go naprawić.
Wszystko zaczęło się od faktu, że przyniósł kilka starych dysków twardych ( rys ..1.) I powiedzieli, że tutaj pracownicy są przed "zabiciem", chcesz - wybierz, nie chcę - rób czego chcesz. Ale jeśli to zrozumiesz, jak korzystać z nich jako małej emery do edycji narzędzi, powiedz mi. Cóż, tutaj - mówię ...
Pierwszy HDD - Rodzina kwantowa "Fireball TM" z układem dysku TDA5147AK ( rys. 2.). Zobaczmy, czym jest.
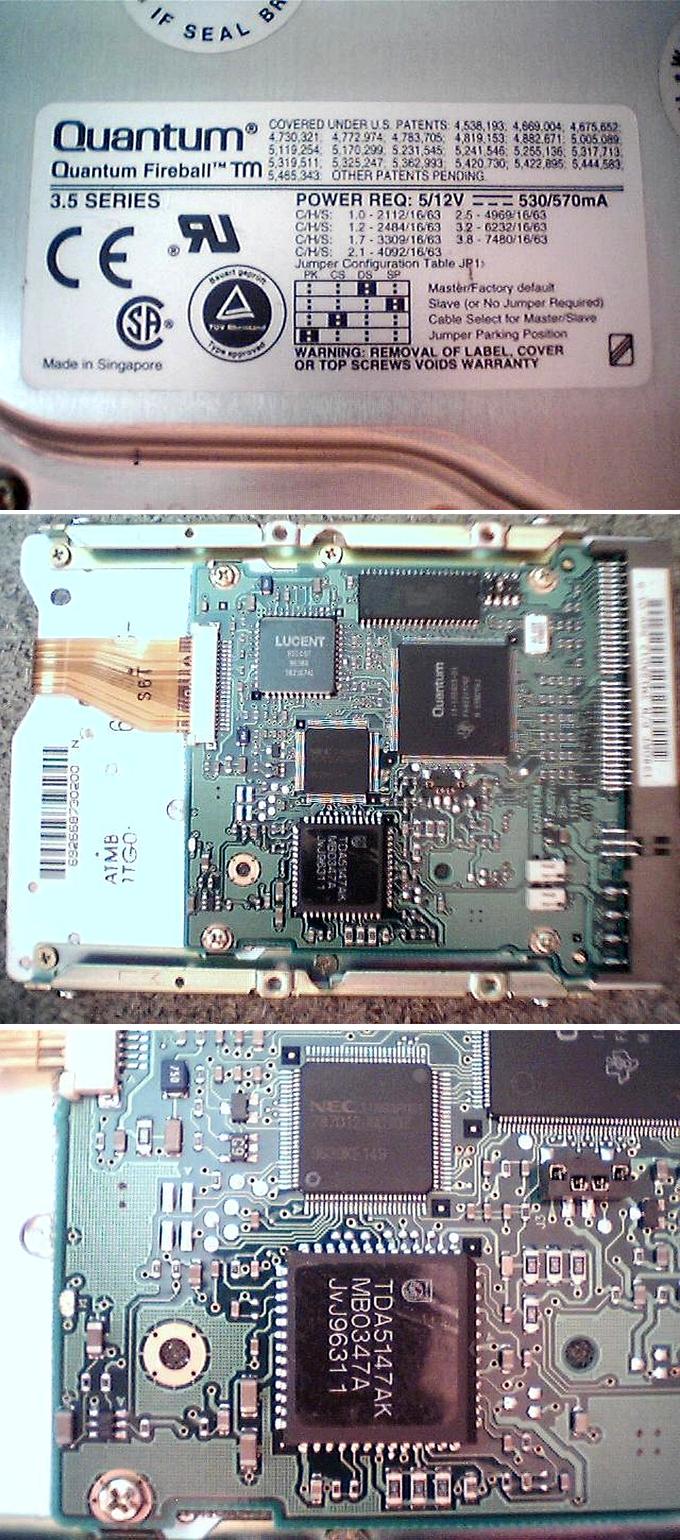
Górna pokrywa jest przymocowana z 4 śrubami w rogach i jednej śrubie i nakrętce, pod górną, pod naklejkami. Po usunięciu pokrywy, dysk sztywny jest widoczny, czytanie głowic i system zarządzania pozycjami głowicy magnetycznej ( rys. 3.). Odłączamy kabel, odkręcimy system magnetyczny (tutaj potrzebujesz specjalnie zaostrzonego klucza sześciokątnego "Star"). Jeśli chcesz, płyta można również usunąć, jeśli odkręcasz trzy śruby na wrzecionie silnika (potrzebujesz również sześciokąt).

Teraz umieściliśmy pokrywę na miejscu, aby można było obrócić dysk twardy do eksperymentów z elektroniką i podawany w złączu zasilania napięcia +5 V i + 12V. Silnik jest przyspieszony, działa około 30 sekund, a następnie zatrzymuje się (na płytce drukowanej drukowanej jest zielona dioda LED - oparzenia, gdy silnik jest obracany i miga, gdy się zatrzyma).
Sieć jest łatwa zlokalizowana na chipie TDA5147K, ale nie udało się poradzić sobie z rozdzielczością / sygnałem zakazu. Kiedy "Ciągnie" sygnały Por do magistrali energetycznej, nie było możliwe, aby osiągnąć niezbędną reakcję, ale podczas oglądania sygnałów z oscyloskopem okazało się, że gdy sonda 7. wycofanie układu TDA5147AK jest resetowania i ponownego uruchomienia silnik. Tak więc, zbierając najprostszy krótki generator impulsów ( rys. 4., Dolne zdjęcie) W okresie kilku sekund (lub dziesiątki sekund), można zmusić silnika, aby obrócić mniej lub bardziej stale. Wschodzące przerwy w zasilaniu trwa około 0,5 sekundy, a to nie jest krytyczne, jeśli silnik jest używany z małym obciążeniem wałku, ale w innych przypadkach może być niedopuszczalne. Dlatego metoda jest skuteczna, ale nie dość poprawna. I "poprawnie", aby go uruchomić i nie powiódł się.

Następny HDD - "Kantum" rodziny "Trailblazer" (rys.5.).

Podczas dostarczania napięcia zasilania napęd nie dostarcza żadnych oznak życia, a mikroukciucha 14-107540-03 rozpoczyna się na płycie elektroniki. W środku obudowy chipu wypukłość jest zauważalna ( rys.6.) Co mówi o jej wyraźnej niewłaściwości. To wstyd, ale nie straszny.

Patrzymy na mikroukładkę sterowania obrotem silnika ( rys.7.) - HA13555. Nie nagrzewa się i nie ma widocznych uszkodzeń. Testowanie testera elementów "Spinając" nie wiedziały nic specjalnego - pozostaje tylko do radzenia sobie ze schematem "Inclusion".

Wyszukiwarki DataShet go nie znajdują, ale jest opis na HA13561F. Wykonany jest w tym samym przypadku, zbiega się na nogach nakrętek i na "wyjściowych" konkluzjach z HA13555 (ta ostatnia do przewodów mocy silnika zmieciona diody - ochrona przed kontr-EMF). Spróbujmy określić niezbędne wnioski zarządcze. Z arkusza danych na HA13561F ( rys.8.) Wynika z tego, że częstotliwość zegara 5 MHz z poziomem logiki TTL musi być stosowana do wyjścia 42 (zegar) i że sygnał, który umożliwia start silnika jest wysoki na wyjściu 44 (Spnenab).

Ponieważ chip 14-107540-03 nie działa, następnie odcinamy moc +5 z niego i ze wszystkich innych żetonów, z wyjątkiem HA13555 ( rys.9.). Tester Sprawdź poprawność "Cuts" na brak związków.
Na dolnym zdjęciu rysunek 9. Czerwone kropki pokazujące podroby naprężeń +5 w dla HA13555 i rezystor "Szelki do plus" jego 44 wyjścia. Jeśli rezystor wyjściowy 45 zostanie usunięty z miejsca natywnego (to jest R105 cyfra 8.) i umieść go pionowo z pewną skłonnością do chipa, a następnie dodatkowy rezystor do zawieszonego na "Plus" wyjścia 44 może być lutowane do otworu przejściowego i do cichej mocy pierwszego rezystora ( rys.10.) A potem moc wynosi +5 V, może być dostarczana do ich połączenia.

Z tyłu tablicy utwory należy wyciąć, jak pokazano na rysunek 11.. Są to "były" sygnały pochodzące z spalonego układu 14-107540-03 i stare "zawieszenie" rezystora R105.

Możesz zorganizować "nowe" sygnały zegarowe, aby wyświetlić 42 (zegar) za pomocą dodatkowego generatora zewnętrznego montowane na dowolnym odpowiednim układzie. W tym przypadku użyto K555LN1 i uzyskany schemat jest pokazany na rysunek 12..

Po "podłączeniu" z przewodem MGTF napięcia zasilającego +5 V bezpośrednio z złącza do wyjścia 36 (VSS) i inne wymagane połączenia ( rys ..13.), Napęd rozpoczyna się i działa nonstop. Oczywiście, jeśli chip 14-107540-03 był prawidłowo, wszystkie wyrafinowanie byłoby tylko w "Treet" 44. wycofania się do magistrali +5 V.

Na tej "śrubie" jego wydajność została przetestowana na inne częstotliwości zegara. Sygnał podawano z zewnętrznego generatora prostokątnych impulsów i minimalnej częstotliwości, z którą napęd pracował stale 2,4 MHz. W niższych częstotliwościach cyklicznie było podkręcanie i zatrzymanie. Maksymalna częstotliwość wynosi około 7,6 MHz, z dodatkowym wzrostem jego wzrostu, liczba rewolucji pozostała taka sama.
Liczba rewolucji zależy również od poziomu napięcia na wyjściu 41 (CNTSEL). W zapaleniu danych na chipie HA13561F znajduje się tabela i odpowiada wartościom uzyskanym z HA13555. W wyniku wszystkich manipulacji możliwe było uzyskanie minimalnej prędkości obrotowej silnika około 1800 rpm, maksymalnie - 6864 obr./min. Kontrola przeprowadzono przy użyciu programu, optorauplers z wzmacniaczem i kawałkiem taśmy pokazanej na dysku, dzięki czemu okno OPTOCUPLE podczas obracania dysku (w oknie analizatora widma, ustalono szybkość powtarzania impulsu, a następnie pomnożono do 60).
Trzeci napęd - "Samsung WN310820A".
Podczas zasilania mikroukładu kierowca - Ha13561 zaczyna ogrzać się, silnik nie obraca się. Na chipie jest zauważalny wypukłość ( rys ..14.), jak w poprzednim przypadku. Nie będzie działać żadnych eksperymentów, ale możesz spróbować zapisać silnik z płyty z mikroukładem HA13555. Długie cienkie przewody zostały zmiecione do pętli silnika i do styków wyjściowych złącza elektroniki - wszystko zaczęło się i pracował bez problemów. Jeśli HA13561 był całości, wyrafinowanie dla wprowadzenia jest taka sama jak w przypadku Canttum Trailblazer (44. wycofanie się do magistrali +5 V).

Czwarty napęd - Rodzina kwantowa "Fireball SE" Z układem napędowym an8426FBP ( rys .15.).

Jeśli wyłączysz kabel bloku głowy i zastosujesz zasilanie na dysku twardym, silnik zyskuje tempa i, naturalnie po pewnym czasie zatrzymywania. DataShitte na chip an8426FBP jest online i możesz to rozgryźć, że wyjście 44 (SIPWM) jest odpowiedzialne za uruchomienie. rys .16.). A jeśli pójdziesz teraz, aby przeciąć utwór z chipa 14-108417-02 i "Dokręć" wyjście 44 przez rezystor 4,7 COM do opony +5 B, silnik nie zatrzyma się.

I wreszcie, zwracając trochę pleców, formularze sygnałów na wyjściach W i V HA13555 w stosunku do przewodu ogólnego zostały usunięte ( figa. 17).

Najprostszym stosowanym stosowaniem Starego HDD jest mała emery do edycji rolki, nożów, śrubokręt ( rys ..18.). Aby to zrobić, wystarczy przykleić się do papieru ściernego dysku magnetycznego. Jeśli "śruba" była z kilkoma "naleśnikami", możesz wykonać wymienne tarcze o różnych ziarnistości. I tutaj dobrze jest być w stanie przełączyć prędkość obrotu silnika wrzeciona, podobnie jak z dużą liczbą rewolucji, bardzo łatwo jest ukraść zablokowaną powierzchnię.

Wiadomości oczywiście, a nie jedyna aplikacja dla starego dysku twardego. Sieć łatwo zawiera projekty odkurzaczy, a nawet aparat do gotowania słodkiej wełny ...
Oprócz tekstu są wymienione datashels i drukowane płyty płytki drukowane generatory impulsów w formacie 5 wersji (strona drukowania, żetony są zainstalowane jako SMD, tj. Bez wiercenia otworów).
Andrei Goltsov, R9o-11, Isycytim, kwiecień 2018.
Lista elementów radiowych
| Przeznaczenie | Typ | Nominalny | numer | Uwaga | Wynik | Mój notebook | |
|---|---|---|---|---|---|---|---|
| Patrz rysunek nr 4. | |||||||
| DD1. | Żeton | K561LN2. | 1 | W notebooku | |||
| R1, R2. | Rezystor | 470 COM. | 2 | sMD 0805. | W notebooku | ||
| R4. | Rezystor | 10 Com. | 1 | sMD 0805. | |||
Jakoś dawno temu natknął się na wykres sterownika silnika krokowego na chipach LB11880, ale ponieważ nie miałem takiego chipa, a silniki leżały kilka kawałków, odłożyłem ciekawy projekt z uruchomieniem silnika w Długie pudełko. Czas minął, a teraz, z rozwojem Chin, nie ma problemów z szczegółami, więc zamówiłem MS i postanowiłem zebrać i przetestować połączenie silników z HDD. Diagram sterownika jest brany standardowy:
Diagram sterownika silnika
Następnie jest skrócony opis artykułu, przeczytaj pełny. Silnik obracający się wrzeciono dysku twardego (lub CD / DVD-ROM) jest zwykłym jednoczesnym trójfazowym silnikiem DC. Przemysł wytwarza gotowe sterowniki sterujące pojedynczych wiórów, które nie są również wymagane przez czujniki pozycji wirnika, ponieważ uzwojenia silnika są uruchamiane w roli takich czujników. Sterowanie mikrokiriuchami silników DC Tri-fazowych, które nie wymagają dodatkowych czujników, są TDA5140; TDA5141; TDA5142; TDA5144; TDA5145 i oczywiście LB11880..

Silnik połączony zgodnie z określonymi schematami przyspieszy aż do limitu częstotliwości generowania układu VCO, który jest określony przez szybkości kondensatora podłączony do wyjścia 27 (niż jej pojemność jest mniejsza, tym wyższa częstotliwość) lub silnik nie zostanie zniszczony mechanicznie. Nie powinno być zbyt zmniejszone przez pojemność kondensatora podłączonego do wyjścia 27, ponieważ może utrudniać uruchomienie silnika. Regulacja prędkości obrotowej jest wykonany przez zmianę napięcia na wyjściu 2 chipsów, odpowiednio: VPIT - maksymalna prędkość; 0 - Silnik jest zatrzymany. Od autora znajduje się napad, ale rozpowszechniam własną opcję jako bardziej zwarty.

Później, żetony LB11880 zamówione przeze mnie, zapieczętowane w dwóch gotowych handkers i spędzili jedną z nich. Wszystko działa idealnie: stawka jest regulowana przez zmianę, obrót jest trudny do ustalenia, ale myślę, że jest to do 10 000 dokładnie, ponieważ silnik otwarto brzęczący.

Ogólnie rzecz biorąc, początek, pomyślę, gdzie się ubiegać. Uważa się, że ten sam dysk ostrzenia co autor. A teraz został przetestowany na kawałku plastiku, wykonał rodzaj wentylatora, dmuchanie tylko brutalnie przynajmniej na zdjęciu nie jest nawet widoczne, ponieważ wiruje.

Podnieś rewolucje powyżej 20 000, przełączając kondensatory kondensatora C10 i zasilanie MS do 18 V (18,5 za granicę). Na tym napięciu mam whistle motor overha! Oto film z 12 woltami:
Połączenia wideo silnika HDD
Podłączyłem silnik z płyty CD, zasilał 18 V diety, ponieważ w mojej piłce w piłce przyspiesza, tak że skacze wszystko wokół! Szkoda, że \u200b\u200blitość nie śledzi rewolucji, ale jeśli oceniasz dźwięk, jest bardzo duży, do cienkiego gwizdka. Gdzie korzystać z takich prędkości, oto pytanie? Przychodzi na myśl mini bułgarski, wiertarka deska, szlifierka ... wiele aplikacji - pomyśl sam. Zbierz, testuj, udostępnij swoje wrażenia. W Internecie istnieje wiele recenzji przy użyciu danych silników w ciekawych strukturach domowej roboty. W Internecie zobaczyłem wideo, w tym silnikowym mistrzom silnikowym, super fanów, ostrzarki, można umieścić go, gdzie stosować taki gniew, silnik przyspiesza ponad 27 000 obrotów. Z tobą był Igoran..
Omów artykuł, jak podłączyć silnik z DVD lub HDD
. Temat jest bezwarunkowy interesujący specjalnie dla początkujących radia "Torentorów", ale moim zdaniem nie jest całkowicie ujawniona. Nieukończenie logiczne, a mianowicie, jaki schemat używał wielu szanowanych, twisterza jego decyzję, zaproponowaną przez Lee (mój kolega w dziele dziennikarskie)S.anyaAV na m / s tda5145, MK lub inne. Ten artykuł, który chcę uzupełniać niektóre luki forum i powiedzieć, moim zdaniem, o dość godnym przynajmniej nowoczesnych standardów i starego układuFUNT.11880. I więc zacznijmy i zacząć od ogólnych informacji, jaki jest silnik z HDD, CD-ROM, DVD-ROMObracanie silnika wrzeciona dysku twardego (lub CD / DVD-ROM) jest synchronicznym trójfazowym silnikiem DC.
Możesz wybrać taki silnik, podłączając go do trzech kaskadach pół mostowych, które są sterowane przez generator trójfazowy, którego częstotliwość jest bardzo mała po włączeniu, a następnie płynnie wznosi się do nominalnego. To nie jest najlepszym rozwiązaniem problemu, taki schemat nie ma informacji zwrotnych, a zatem częstotliwość generatora wzrośnie w nadziei, że silnik ma czas na zdobycie pędu, nawet jeśli w rzeczywistości jego wał nadal jest. Stworzenie schematu sprzężenia zwrotnego wymagałoby użycia czujników pozycji wirnika i kilku kompilacji EMS, nie licząc tranzystorów wyjściowych. CD / DVD-ROM zawiera już czujniki hali, wzdłuż sygnałów, których można określić położenie wirnika silnika, ale czasami nie ma znaczenia dokładnie dokładnej pozycji i nie chcemy myć "dodatkowych przewodów".
Na szczęście branża produkuje gotowe sterowniki sterujące, które oprócz, nie potrzebują czujników pozycji wirnika, uzwojenia silnika są uruchamiane w rolce takich czujników.Mikrocipki sterujące z trójfazowych silników DC, które nie wymagają dodatkowych czujników (czujniki są silnikiem, które się kręci):TDA.5140; TDA.5141; TDA.5142; TDA.5144; TDA.5145 i oczywiście FUNT.11880. (Istnieją kilka innych, ale inny czas)
Schematyczny schemat połączenia silnika z mikrokruguitem LB11880.
Początkowo mikrokirukysta jest przeznaczony do sterowania rejestratami wideo silnika BVG, w kluczowych kaskadach ma tranzystory dwubiegunowe, a nie MOSFET.W swoich strukturach użyłem tego konkretnego chipa, po raz pierwszy, okazało się, że jest w najbliższym sklepie, po drugie, jego koszt był niższy (choć niewiele) niż w innych żetonach z góry listy.
Właściwie obwód zasilania silnika:

Jeśli silnik nagle ma 3 wyjście 4, należy je podłączyć zgodnie ze schematem:

I kolejny bardziej wizualny schemat przystosowany do użytku w samochodzie.
Trochę więcej informacji na temat LB11880 i nie tylko
Silnik podłączony przez określone schematy przyspieszy aż do limitu częstotliwości generowania układu VCO, który jest określony przez współczynniki kondensatora podłączone do wyjścia 27 (w jaki sposób jego pojemność jest mniejsza, tym wyższa częstotliwość) lub silnik nie zostanie zniszczony mechanicznie.Nie powinno być zbyt zmniejszone przez pojemność kondensatora podłączonego do wyjścia 27, ponieważ może utrudniać uruchomienie silnika.
Jak dostosować prędkość obrotu?
Regulacja prędkości obrotowej jest wykonany przez zmianę napięcia na wyjściu 2 chipsów, odpowiednio: VPIT - maksymalna prędkość; 0 - Silnik jest zatrzymany.
Należy jednak zauważyć, że nie można płynnie regulować częstotliwość po prostu poprzez zastosowanie rezystora zmiennego, ponieważ regulacja nie jest liniowa i występuje w mniejszych limitach niż VPIT - 0, w tej najlepszej opcji zostanie podłączony do tego Skraplacz, z którym przez rezystor, na przykład z mikrokontrolera. Sygnał PWM Dobrze lub regulator PWM na światowym znanym timerzeNe.555 (takie schematy w Internecie są w pełni)
Aby określić bieżącą prędkość, należy stosować wyjście 8 żetonów, na których impulsy są obecne podczas obracania wału silnika, 3 impulsy na 1 obrót wału.
Jak ustawić maksymalny prąd w uzwojeniach?
Wiadomo, że trójfazowe silniki DC zużywają znaczące prąd poza ich trybami pracy (gdy są one zasilane przez połączone impulsy częstotliwości).Aby ustawić maksymalny prąd w tym schemacie, podano rezystor R1.Gdy tylko spadek napięcia na R1, a zatem wyjście 20 stanie się więcej niż 0,95 woltów, a następnie sterownik wyjściowy chip przerywa puls.Wybór wartości R1, rozważ, że dla tego układu maksymalny prąd nie jest więcej niż 1,2 amper, nominalna 0,4 wzmacniacza.
Parametry Chip LB11880.
Napięcie zasilania etapu wyjściowego (wniosek 21): 8 ... 13 woltów (maksymalnie 14,5);
Jądro zasilania (wyjście 3): 4 ... 6 woltów (maksymalnie 7);
Maksymalna moc mikroukładów rozpraszających: 2,8 W;
Zakres temperatur pracy: -20 ... +75 stopni.

Ten dysk (choć gdy nie było żadnych środków miedzianych na nim), wydawałoby się niewielki i sztywny silnik ze starego dysku twardego do 40 GB, zaprojektowany do 7200 obrotów / min (RPM) udało się przyspieszyć około 15 000 ... 17000 obrotów / min jeśli nie ograniczają jego prędkości. Obszar wykorzystania silników z strojenia dysków twardych, myślę bardzo obszerny. Ostrzenie / wiertło / bułgarski z pewnością nie jest wykonane, nawet nie myśl, ale bez specjalnego obciążenia silniki są w stanie bardzo zdolny.
FA.
archiwum ISIL do pobierania samodzielnego montażu
Powodzenia !!
Od dawna pył, mam taki mały silnik, który przekroczyłem z jakiegoś dysku twardego. Dysk, przy okazji, jest również zachowany od niego! Jeśli zebrasz się - przykryj go na następnym etapie. W międzyczasie postanowiłem po prostu spróbować go reanimować. Ten silnik jest interesujący w teorii (jak rozumiem - osoba, która nie wiedział o silnikach), jest zaworem. I jak mówimy Wikipedii: "Silniki zaworów są przeznaczone do łączenia najlepszej jakości silników AC i silników DC". I na koszt braku przesuwnych styków elektrycznych (ponieważ węzeł szczotki zastępuje się tam na przełączniku półprzewodnikowym), takie silniki mają wysoką niezawodność i wysoką żywotność. Następnie nie będę wymienić wszystkich innych zalet tych silników, a tym samym retell Wikipedia, ale po prostu powiem, że korzystanie z takich rzeczy jest całkiem szerokie, w tym w robotykach, a zatem chciał dowiedzieć się więcej o zasadach ich pracy.
Zasada działania HDD silnika.
W silniku trzy uzwojenia podłączone przez zasadę "gwiazdy". Ogólny punkt uzwojenia jest wyświetlany na plus. + 5 V do pracy jest doskonale odpowiedni. Silnik sygnałowy jest sterowany, który musi być podawany do uzwojenia z przesunięciem fazy 120 °. Jednak nie można przesłać żądanej częstotliwości na silniku, musi być przytłoczony. Najprostszym sposobem podłączenia trzech uzwojeń przez tranzystory, podając sygnał PWM do podstawy z mikrokontrolera.Natychmiast dokonać rezerwacji na tranzystorach: Lepiej wziąć pola, ponieważ obecne przez nich wydaje się być przyzwoite, a bivolar jest bardzo gorący. Najpierw zajęło 2N222a. Ogrzewany w sekundach, tymczasowo rozwiązał problem, instalując szereg chłodnic, ale następnie zdecydował, że coś było potrzebne, to znaczy, więcej niż ☺ w rezultacie, umieścimy nasze CT817. Trzeci nie okazał się, zamiast tego mam CT815. W tym schemacie można je wymienić, ale KT815 jest przeznaczony do stałego prądu kolektora 1,5 AMPS, a KT817 - 3a. Zauważam, że 2N2222a jest na ogół do 0,8a. Litera KT81 ... nie gra również ról, ponieważ mamy tylko 5 woltów. Teoretycznie częstotliwość zmiany sygnału nie jest szybsza niż 1 milisekund, jest naprawdę bardziej wolniejszy, dzięki czemu wysoka częstotliwość tranzystorów też nie odgrywa roli. Ogólnie rzecz biorąc, podejrzewam, że w tym schemacie możliwe jest eksperymentowanie w prawie dowolnych tranzystorach N-P, z prądem kolekcjonerskim co najmniej 1 amper.
Dołączyłem program, rezystory zostały również wybrane eksperymentalnie, 1 KILOM - działa wystarczająco dobrze. Umieść kolejny 4,7 tys. - To dużo, glaś silnika.
W wyjściu silnika 4. Na początku dowiedz się, który jest powszechny. W tym celu multimetr mierzy opór między wszystkimi wnioskami. Opór między końcami uzwojeń wynosi dwa razy więcej niż między końcem tego samego uzwojenia i całkowitego środkowego punktu. Warunkowo 4 ohm przeciwko 2. Jaki rodzaj uzwojenia, gdzie się połączyć - nie ma znaczenia, nadal idą do siebie.
Tekst programu:
// Uruchomienie silnika dysku twardegoustawienia pustki ()
#Define p 9100 // Wstępne opóźnienie, aby podkręcać silnik
#Define x 9 // Numer piny do kręcenia x
#Define y 10 // numer pina do kręcenia y
#Define z 11 // numer Piny do kręci
unsigned Int P; // Zmienne opóźnienie do przetaktowywania
długimi time_pass; // timer.
bajt i \u003d 0; // Cykl kontroli fazy silnika Mecle
{
p \u003d p; // Przypisujemy wstępną wartość opóźnienia do podkręcenia//Serial.begin(9600); // Otwórz port COM dla DEBAG
pinmode (X, wyjście); // Zainstalowane szpilki działające z silnikiem wyjścia danych
pinmode (Y, wyjście);
pinmode (Z, wyjście);
cyfrowy (x, niski); // zainstalowany początkową fazę silnika, można uruchomić przy dowolnym z 6 faz
cyfrowy (y, wysoki);
cyfrowy (z, niski);
Time_pass \u003d MICS (); // Zeroing Timer.pętla pusta ()
{jeśli ja< 7) && (micros () - time_pass >\u003d P)) // Jeśli miernik ma numer od 0 do 6, a czas oczekiwania zmienia fazy przeszła
{
Time_pass \u003d MICS (); // Zresetuj timer
jeśli (i \u003d\u003d 0) (Digitalwrite (Z, High);) // Ustaw 0 lub 1 W zależności od numeru fazowego na żądanym PIN
jeśli (i \u003d\u003d 2) (digitalwrite (y, niska);)
jeśli (i \u003d\u003d 3) (cyfrowy (x, wysoki);)
jeśli (I \u003d\u003d 4) (Digitalwrite (Z, Niska);)
jeśli (i \u003d\u003d 5) (cyfrowy (y, wysoki);)
jeśli (i \u003d\u003d 6) (cyfrowy (x, niski);)I ++; // plus miernik fazowy
}
jeśli (i\u003e \u003d 7) // jeśli licznik jest zatłoczony
{
I \u003d 0; // Zresetuj miernik
jeśli (p\u003e 1350) (p \u003d p - 50;) // Jeśli silnik nie wprowadził jeszcze maksymalnej prędkości - zmniejszamy czas zmiany fazy
//Serial.println (P); Czas oczekiwania Debable
}
Co w rezultacie?
W rezultacie mamy silnik, który przyspiesza w ciągu kilku sekund. Czasami podkręcanie jest niezrównoważone, a silnik zatrzymuje się, ale wszystko działa częściej. Jak się stabilizować - jeszcze nie wiem. Jeśli zatrzymasz silnik ręką, nie uruchomi się ponownie - potrzebujesz ponownego uruchomienia programu. Do tej pory jest to maksimum, które udało się z niej wycisnąć. Podczas obniżania p poniżej 1350 r. Silnik leci z przetaktowywania. 9100 Na początku został również wybrany eksperymentalnie, możesz spróbować zmienić, zobacz, co się stanie. Prawdopodobnie, dla innego silnika liczby będą inne - musiałem odebrać sam. Z obciążeniem (oryginalnym dyskiem) silnik przestaje rozpocząć, dzięki czemu instalacja czegoś wymaga kalibracji oprogramowania układowego. Szybko kręci się stosunkowo, więc polecam, gdy zaczniesz nosić okulary, zwłaszcza jeśli w tej chwili coś jest wiszące. Mam nadzieję kontynuować eksperymenty z nim. Chociaż to wszystko, powodzenia!







